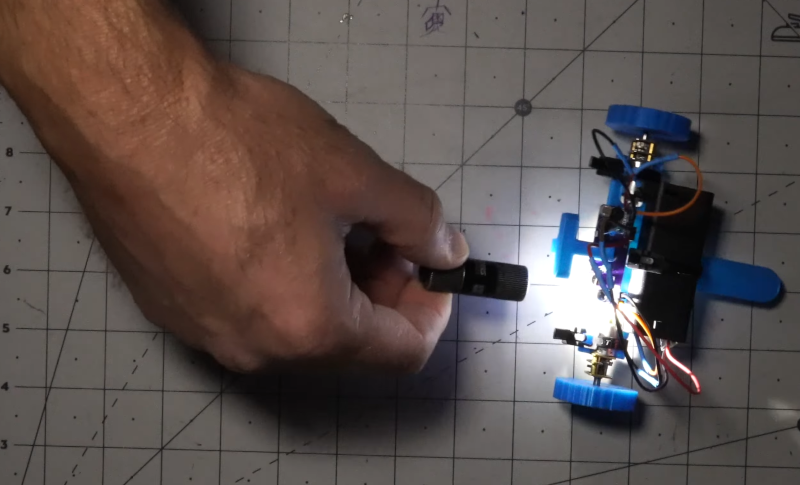
If you ever built a line following robot, you’ll be nostalgic about [Jeremy’s] light-seeking robot. It is a very simple build since there is no CPU and, therefore, also no software.
The trick, of course, is a pair of photo-sensitive resistors. A pair of motors turns the robot until one of the sensors detects light, then moves it forward.
This is a classic beginner project made even easier with a 3D printer and PCB to hold the components. You might consider using an adjustable resistor to let you tune the sensitivity more easily. In addition, we’ve found that black tubes around the light sensors in this sort of application give you a better directional reading, which can help.
The robot only has two wheels, but a third skid holds the thing up. A freely-rotating wheel might work better, but for a simple demonstration like this, the skid plate is perfectly fine.
This is a good reminder that not every project has to be fantastically complex or require an RTOS and high-speed multi-core CPUs. You can do a lot with just a handful of simple components.
If you want to follow a line, the basic idea is usually the same, with perhaps some different sensors. Usually, but not always.














I did a light following robot with help of the good o’ 555 and photo resistor back in college in ’85. It simply had one motor to turn the ‘head’ to follow the light. And yes a black tube helped around the resistor.
Neat! No need for a RPI-5 for that!
Does anyone remember the Cybug Scarab? I think it used a pair photoresistor-controlled 555s (later a single 556) and some sort of driver chip and could be wired to follow or avoid light.
Constructing simple robots using the BEAM philosophy can be a fun side project, especially as an introduction for young children.
Automatic doors (aka “robots”) that used sign-beam sensors have been a thing for decades. I can’t speak for the modern ones, but the early ones didn’t have anything like a CPU or even a microcontroller. Just a light emittor, a sensor, a detection circuit, and the circuit to open and shut the door.
Oh, they probably also had a safety mechanism to keep people from being trapped by closing doors, but this was probably about as simple as the light-detecting mechanism.
Some might have had an “odometer” mechanism to track how many times the door open/shut mechanism had been used.
But all in all, very simple technology for a robot that could basically only do two things: slide door left and slide door right.
Whereas not needing a fully fledged PLC or CPU to implement the control logic, industrial controllers for automatic doors, elevators, automatic train control, etc have been along for eons. Earlier implementations may have relied on relay logic, or neon tubes and vacuum tubes to implement the state machine, with “modern” implementations using 74-series logic or discrete transistor gates, aside from some niche applications using pneumatics.
Neither having been as simple or rudimentary as the analog feedback implementation used in the common line following robot.
Reminds of LogicBots. That was one of the examples.
https://store.steampowered.com/app/290020/LogicBots/
BEAM Robotics flashbacks!
https://en.wikipedia.org/wiki/BEAM_robotics
Had a toy car in the 60’s. Two sensors in the roof of the car. Shine a flashlight on either one and the front wheels steered it. No microcontrollers in that. Just good old bjts…
Wonderful flashback to the days of Radio Shack and Forrest Mimms!
I’m getting some Valentino Braitenberg vibes.