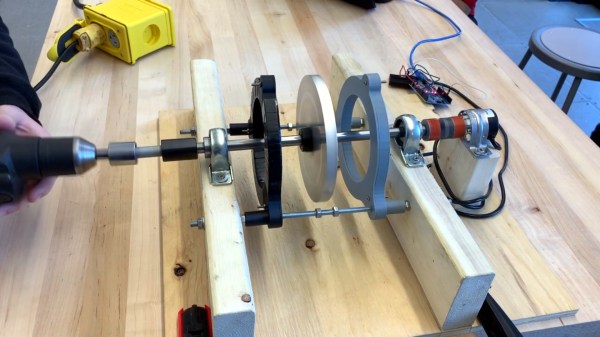
[Arnav Wagh] has been doing some cool experiments in soft robotics using his home 3D printer.
Soft robots have a lot of advantages, but as [Arnav] points out on his website, it’s pretty hard to get started in the same way as one might with another type of project. You can’t necessarily go on Amazon and order a ten pack of soft robot actuators in the way you can Arduinos.
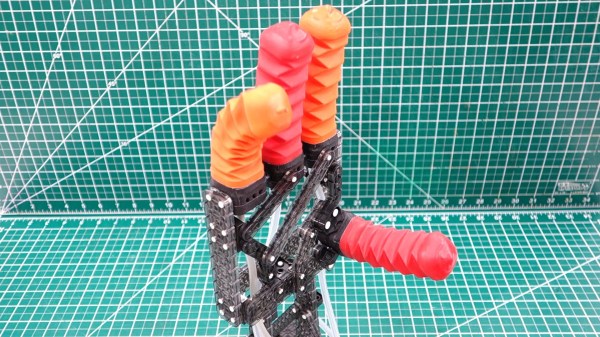
The project started by imitating other projects. First he copied the universities who have done work in this arena by casting soft silicone actuators. He notes the same things that they did, that they’re difficult to produce and prone to punctures. Next he tried painting foam with silicone, which worked, but it was still prone to punctures, and there was a consensus that it was creepy. He finally had a breakthrough playing with origami shapes. After some iteration he was able to print them reliably with an Ultimaker.
Finally to get it into the “easy to hack together on a weekend” range he was looking for: he designed it to be VEX compatible. You can see them moving in the video after the break.