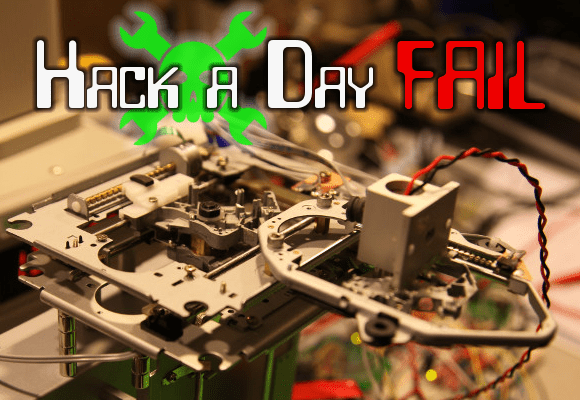
This Fail of the Week is really only a failure because of the standards to which [eLabz] holds himself. The rig pictured above is a laser cutter built out of DVD drive parts. It goes above and beyond most of the optical drive CNC projects we see around here — it actually makes cuts! But [eLabz] looks on it as a failure because the steps of the driver motors are visible as jagged edges in those cuts. We see this more as a pausing point in the development process before the next refinement is made.
First off, look really closely at the assembly to the left. This is responsible for the X-axis and a very keen eye will have noticed there are two sets of DVD lens sleds stacked on top of one another. This design allows the laser to travel twice as far (a whopping three inches in this particular case). Here’s a rendered video that was made to help visualize how this would work before building it:
You have to admit this is pretty sweet! But renders are nothing, it actually exists too. The double x-axis and the single y-axis are both used to move the laser diode, meaning the work piece is stationary. [eLabz] mentions he thinks this presents a problem because there is some play in the system. In addition to that the test piece he ran clearly shows the point at which each step of the motor was taking. The line is jagged, but with stepper motors it should be possible to have much better resolution. Right?
So where do think he went wrong? In looking back he figures he should not have used DVD parts as the tolerances just aren’t where he needs them. But he’s come so far we want to know how you’d take it the extra mile to achieve the smoothest cuts possible. Join the discussion by leaving a comment below.
But first, check out a close-up video of the tandem x-axis sleds running:
 Fail of the Week is a Hackaday column which runs every Wednesday. Help keep the fun rolling by writing about your past failures and sending us a link to the story — or sending in links to fail write ups you find in your Internet travels.
Fail of the Week is a Hackaday column which runs every Wednesday. Help keep the fun rolling by writing about your past failures and sending us a link to the story — or sending in links to fail write ups you find in your Internet travels.















I can’t agree with this being a fail. It is a work in progress, even stated in the write up. This does not constitute failure. This write up is the only failure here.
when you’re building stuff for yourself, you’re the one that has final say over its success. the fotw projects were emailed to had by a builder that considers it a failure. its not like they’re out scouring the web looking for people to put down.
You’re absolutely right, I’ve sent it in myself and don’t feel being put down in any sense. The project is over and it did not achieve the intended goal – nothing to be sour about, I’ve got plenty more coming.
Garrett, thanks again for standing up for me! It’s quite alright, I appreciate one final opportunity to do a postmortem on the project.
Cheers!
But this is rare… A response along the lines of “But wait, this doesn’t suck nearly as much as you think it does…” is very rare and is to be celebrated!
hm. the math is easier if you fully extend one sled before activating the other, running both at the same time can square the problem.
If you fully extend one sled, then switch to another and fully extend that one, the entire full travel worth of positioning error of the first is then added to the error of the second. You will basically arrive in the same wrong place but by two distinctly different paths. Since this is a laser cutter, the path is everything, so you would always prefer a path that better resembles the ideal. Also, if you fully extend one before swithing to the other, your cuts will look like they have two distinctly separate halves.
It was a thought experiment at first – with accurate steppers you don’t normally see the positioning errors clearly – but these tiny 20SPR steppers provided an opportunity to see the errors with a naked eye. So, if I have to do the tandem scheme again for any reason, I will still do it A-B-A-B-A-B instead of AAA-BBB.
Cheers!
im curious: if the laser is powerful enought couldnt you use a AB-AB-AB scheme to get double the speed out of this rig?
also taking apart a cd/dvd drive there are lots of gears couldnt you improvise a reducing gearbox to improve accuracy?
I was thinking the same thing… He does elude to that possibility in the article on his page. This is a great first try – and kudos on keeping the whole thing very inexpensive. I think the adage applies though – you get what you pay for. Time to use better stepper motors and better motion mechanics.
He’s so cantilevered that it doesn’t look like there’s any rigidity left. I’d look at fixing the laser and moving the material down on the ground instead. However, those steppers look pretty “steppy”, anyways, so maybe it wouldn’t matter.
Very true, this is not the most rigid CNC built you’ve ever seen :) but I have to say, the steppers killed the idea before I even got to the point where I would’ve worried about the laser swinging on the cantilever, the inertia, vibration or basically any of the mechanical stuff.
Garrett, the builder of the fail of the week here :)
I considered it a failure because I could not even get it to the point where I could test any issues specific to the tandem extension – the actual reason the project was started in the first place. It just turned out impossible to drive those 20SPR steppers coupled to a 3mm pitch lead screw and NOT have those jagged edges. For practical purposes, one can live with either tiny 1.5″x1.5″ workarea or the inaccuracy – but not both.
I’m still very much interested in this nano-sized CNC to use as a LinuxCNC teaching tool. In fact, I’ve found some ancient CD-ROMs that may prove even better – they are driven by DC motors, not steppers, and have optical encoders coupled to the DC motors – this is the direction I want to explore next. But for now I need to break apart my “fail of the week” so I can have some more space on the bench :)
In other words they have a servo motor driven lens sled and rely far less on the magnetic lens positioning coils. Using a coarse stepper motor (that looks like a refugee from a floppy drive) and a large magnetic lens positioning range make the whole works less expensive.
While on the subject of optical drives, a useful project would be a drop in gear drive replacement for the cheap belt driven tray eject on game consoles. While I had my free Xbox 360 apart to clean it and boil* the eject belt I figured out exactly how a geartrain could be retrofitted. Just need the tools to make the parts. A system would have to be designed for each type of drive used. I’d expect only the hardcore gamers and console collectors to be willing to pay the price to eliminate stuck closed disc trays forever.
*Yup, boil. Bring water to a rolling boil in a small pan, remove from heat then drop the belt in for a minute. Fish it out, dry it off then reinstall on the disc drive. The hot water cleans it and the heat makes it shrink enough to restore its tension on the pulleys.
Thanks [Garrett], for the well-documented writeup. I enjoyed it. Hope you at least got a good deal on the 60+ DVD drives. ;)
LOL, Chris. The deal was great at less than $1 each on some of them, except I now have to figure out what else can I do with all those drives. I’ve taken parts from at most a dozen so far, the remaining 50 or so are still waiting for their fate…
you mentioned at one point that you wanted to use a cd drive because it had an optical encoder, have you considered robbing the encoders out of a ball mouse. they are pretty much throw away at this point, but you may be able to scrounge one up. you may be able to use this as feed back for positioning your voice coil as-well.
Thanks for the suggestion! Somehow I don’t come across throwaway mice as often as throwaway drives but perhaps only because I don’t look for them :) I’d say that part of the initial appeal of the drives to me what that they were a self-contained linear drive unit – there are slides, the motor, the drive, all already mechanically connected together in a pretty nice and accurately built fashion. The understanding of the issues with accuracy came much later in the project.
I’ve yet to figure out if and how the voice coils can be used – they are carrying a lens and at this point in the optical system this lense will just kill the beam (will greatly shorten focus distance, already pretty short). Also, I’m not an experienced optic physicist, I’ve no idea how the beam is going to be affected if you start shifting two double convex lens laterally (along the axis perpendicular to their focusing axis) – perhaps it’s yet another area to explore.
You should also consider moving a mirror instead of an entire assembly, the less mass you need to move the easier it is to move it
Not worth it for a small laser diode – a good bracket and a front face mirror will probably weight just as much. Besides, it that case all alignments would have to be perfect in the strict optical sense which is a bit beyond the scope of this hobby project.
how about mounting the mirror on a gimbel and using voice coils for positioning. I am talking out my A$$ here but i believe that is how from1 does their uv curing.
I would not have guessed that those steppers would be as crude as 18 deg/step. It means that those voice coil motors on the lens mechanism is responsible for precisely ‘tuning into’ the tracks on the DVD.
You are not kidding! Not only they are 18 deg/step, the rotor is magnetized rather coarsely and not all steps are really 18 degrees, and to top all that, they are coupled to a whopping 3mm pitch lead screw (the screw is an integral part – no way to “decouple”, I’ve tried …) so in theory you can get 0.15mm resolution per step. Sound like small enough until you realize that optically, this is a huge step – can easily see details much smaller than 0.15mm with a naked eye. I am assuming the 3mm pitch is in the name of faster random access speed. So, yes, the voice coils do most of the fine positioning.
Microstep that shit?
Tried that – doesn’t work. Steppers are overloaded compared to their intended use and don’t move on microsteps. Basically, you send 8 MSes and it only moves on the 8th. Worse yet, sometimes it moves on the 2nd, sometimes on the 6th etc. – complete chaos ensues when both axis need to move
Fail on project but a win for anyone thinking of using this setup or parts for anything requiring accuracy.
Where is Yarr at? I’m waiting for more of his flaming.
Another problem with the steppers (possibly mentioned above somewhere?) is that they take big steps, while the floating lens of the laser (i forget what this is called) makes the small movements with a magnet. I was disappointed to find this out too..
As for moving forward, take apart a couple scanners and use those to increase the build platform and maybe accuracy. You should be able to use all the code and controller you used before.
They call those “voice coils”, I’m assuming because they are reminiscent of speaker coils and yes, I have thought about integrating those for fine positioning but quickly discarded the idea because the difficulties of coordinating movements of the coils with the movement of the stepper. CD/DVD/Bluray drives have it “easy” – they have a positioning feedback based on continuity of data they are reading off of the disk – I could not think of any way to replace that in a laser cutter.
Regarding scanners (and of course perhaps parts of printers / fax machines etc.) – it’s a possibility but I kinda set the parameters of the project based on unmatched availability and costs of old/bad CD and DVD drives. There are millions of them out there and they cost a buck each, if you have to pay any money that is. Scanners and printers are nowhere near as ubiquitous. I have not given up on DVDs yet, I still have 9,998 more “ways to not build a laser cutter” to discover :)
I’ve thought about using a CD as an encoder wheel. If you used a CD as a scale you could put a data laser on your sled pointed up at a data CD. Using better stepper motors and lead screws would probably be more sensible than going through all of that trouble though.
Your biggest challenge is meeting your own goals. Managing to do that might call for some extra effort on your part.
In another post it was mentioned that your stepper motors are not very powerful. One way to increase the strength of stepper motors is to use two in place of one. Although setting up two stepper motors has its own difficulties attached to it as well. But with the constraints of your parameter set guiding you that extra trouble may be justified in your case.
Based on the knowledge you’ve gathered working on your project so far it might be time to reevaluate your original parameters I think. From what I’ve seen I’d have to say what you are trying to do is pretty unfeasible. Not all good challenges are worthwhile ones to pursue.
At first, I was like “Seriously guys? This whole thing is kind of mean.”
Then I read it twice. Lots to learn here. Good on you for being willing to publish a failed experiment, put your name on it, and say why it went wrong and how to improve on it. A lot of other people (all five of them ;) ) have probably done exactly this and blamed themselves when it went wrong, when it’s really because of a DVD part’s specs.
Cheap junk is cheap junk huh?
if he says its a fail ill take his word on it but from my eye it looks like a success!
Thank you BiOzZ, you are very kind! Thomas Alva Edison might have said that I haven’t failed, I’ve succeeded in finding a way to build a laser cutter from DVD parts that doesn’t work :) LOL
haha well it looks like it works fine … a bit jittery but i would challenge anyone to do better XD
i guess one mans fail is another mans success!
I’m curious is this the fail of the week only because Hackaday doesn’t get enough submissions to select the ‘winner” from. How many “here hold my beer and watch this” sort of entries are there ?
I’ve used a lot of these CDROM steppers in my work. If you are lucky enough to find steppers with removable caps you can just replace that clunky 3mm pitch screw with a 0.5mm pitch brass threaded rod. Drive in half-step and you’ve got yourself a 12-fold increase in accuracy. Drilling the centre indents for the 1-1.5mm ball bearings is the only tricky bit, but quite achievable with a milling machine.
NewtonLabs, thanks for the suggestion! I admit, never seen a DVD stepper where the screw could be separated. It is usually a single length of single-start 3mm pitch polished metal screw 65mm in length with those indents for balls at each end that you’ve mentioned. The rotor is usually nothing more than two magnetized ferrous rubber or ferrite rings glued right ontop of the screw.
I have actually attempted something like you are suggesting with disastrous results – I literally cut off the part that sticks out of the stator and put a brass sleeve on it and glued a 4-40 (or was it M3? can’t recall) into the other end of it, trying to rest it against the far side Teflon bearing. That indent and that ball are the key! I have no lathe to even attempt to create the proper indent (and the would be perplexed by the task of centering an already threaded tiny rod in a collet) and whatever I tried to emulate that ball bearing didn’t work – it just snapped right out of the bearing.
But I agree, it would be awesome to have 40 threads per inch (0.635 mm pitch) instead of 3mm pitch! Been there, tried to do that, didn’t succeed. I actually forgot to describe that mini-failure in the write up about the overall failure of the project :)
spring load the sleds so that the movement is pulled against the zero mark. You can either do this individually, or you can do it for the combined sled design. The spring tension shouldn’t need to be excessive, just enough to guarantee the position on the screws is a known value, not a known value + slop introduced by the play the mechanism has on the worm screw.
robomonkey, thanks. Not entirely sure what you’re suggesting tho: the screw/nut mechanism already has provisions to mitigate the play. The “nut” is a spring-loaded Teflon part that’s pushing against the screw hard enough to eliminate backlash (if the load is reasonable). I did not run into any backlash-induced errors, the steppers killed the accuracy before I even got there.
So, how come it CAN make circles with the only issue of a slight error of two short straight line segments on two opposite sides?
I mean everybody is claiming here that it’s an issue with the stepper steps, but then circles would also look way more off surely.
Thanks for your input!
The circles aren’t really circles in the strict geometrical sense – they are pretty distorted. The accuracy and truthfulness of the paths was very important to me. If you look at my tiny airspace models here http://elabz.com/resources/cnc-files/ , they are all designed to hold together without glue just by the friction in the foam parts. Even small deviations are enough to ruin the model. I actually did cut a complete Spitfire fighter model but it looked so awful, I did not even take a picture.
There are some parts in those models (like the landing gear on the Bumblebee rocket) where the thickness of the part is about the tolerance that was even theoretically achievable on this cutter. (Disclaimer: all my models pictured there are cut using a professionally made Chinese CNC router called Sable-2015 with 400SPR steppers and 1mm pitch lead screws). The fact that I could not achieve anything close to the theoretical accuracy made the outcome pretty useless to me, hence this post.
I have a feeling the circles may look a-OK on the small picture, but download the full size one and you’ll see what I mean.
This guy seems to have succeeded: http://www.heise.de/hardware-hacks/projekte/Laserplotter-1745578.html?from-mobi=1 (German text)
Interesting! This is the “classical” scheme of DVD-to-CNC conversions (if the word “classical” is already applicable of course) – two sleds mounted orthogonally. I don’t yet know how much of a positioning improvement this scheme brings but I would say that minute imperfections in accuracy would have been concealed by the width of the burns, so it really is hard to see on those photos if his rig is any more accurate. I sure hope it is!
@Electronick: The idea of a nano CNC is very appealing to me. I tried also, and failed also, but not at the same point as you.
I decided not to extend any axis and restrict myself to a ~30mm travel. I used a “reprap” positionning so the X axis is moving the plate and the Y axis is perpendicular, on top.
My problem was in the electronics. I tried to replicate grbl on a pic18f and lost a lot of time on that. I could not drive both motors in a straight line, hence the declared temporary failure.
This problem is solved now that I have an eshapeoko and I know grbl.
The next problem was the crappy motors, 20 SPR and a 3mm pitch screw makes a very bad resolution. The solution is microstepping. The DRV885 from pololu has a 1/32 mode, which could achieves a 640 mspr resolution on these motors, which amounts to a linear resolution of 0,0046875 mm per step. This is not bad for a micro CNC.
I even know a recent TI driver that achieve 1/256 microstepping. I’m building a prototype board for that, and then I’ll resurrect my microCNC project.
here is a picture of the contraption: http://www.f4grx.net/wp-content/uploads/2013/02/19_Photo1422_mounted.jpg
BR
BR, interesting design! The four-point mounting of both axis should make it very stable indeed. Kinda difficult to put the material on the table (not much access because of the columns) but not too bad, I guess.
Not to be a downer here but I have played with microstepping (up to 1/8th with EasyDriver ) and found no improvement in accuracy whatsoever. The problem is that not all microsteps result in actual physical movement. I am absolutely certain that if you start using 1/32th, you will not see the motor even twitch before first 8 to 12 microsteps have passed (and I’m being optimistic here). The difference in motive force of each incremental microstep is just not enough to move the rotor – the 3mm pitch of the lead screw requires a lot of torque and it’s just not there in this tiny motor. Also consider that there’s a ±10% angular tolerance in the way each step of the rotor is magnetized (also being very optimistic here), which for this 20SPR motor is a whopping 1.8° . In other words, there is absolutely no reason to play with 1/256th microsteps as the difference in the rotation angles between the microsteps is smaller than the uncertainty of the angle of magnetization.
Anyway, once again, sorry for sounding like a naysayer. It’s just physics and limitations of the hardware. One way to improve the accuracy slightly is to use a laptop laser sled. Laptop steppers are even less SPR – 16SPR instead of 20SPR but their lead screw is 2mm pitch instead of 3mm – a whopping .025mm improvement in accuracy!
Good luck with your project! I am also planning on returning to mine (it will be completely redone tho) – check back on my blog sometime for project notes and share yours!
But you still got the diode itself to make cuts. that itself is a Win factor