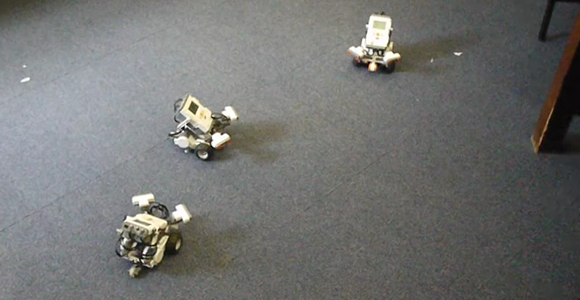
Do you ever wonder why geese always fly together in a V-shape? We’re not asking about the fact that it makes the work load much less for all but the lead goose. We mean how is it that all geese know to form up like this? It’s is the act of flocking, and it’s long been a subject of fascination when it comes to robotics. [Scott Snowden] researched the topic while working on his degree a few years ago. Above you can see the demonstration of the behavior using LEGO Mindstorm robots. That’s certainly interesting and you’ll want to check out the video after the break. But his offering doesn’t end with the demo. He also posted a huge article about his work that will provide days of fascinating reading.
We can’t begin to scratch the surface of all that he covers, but we can give you a quick primer on his Mindstorm (NXT) setup. He uses these three bots along with a central brick (the computer part of the NXT hardware) which communicates with them. This lets him use a wide range of powerful tools like MatLab and Processing to recognize each robot with a top-down camera, passing it data based on info harvested with computer vision. From there it’s a wild ride of modeling the behavior as a set of algorithms.














Can this be considered as flocking? The way I understood it is that the camera gets the coordinates of each robot and transmits constantly the best postiion to each robot, depending on the position of the others.
To me, real flocking is when an individual adapts its position only depending on its neighbor and the resulting V-shape (for example) is just a consequence of this. (The birds don’t have any supervision camera to tell them how to form a perfect V)
Sorry if I mis-understood the explanation above, english isn’t my mother-tongue…
You’re right, flocking works how you explain. That’s how this system also works, it only uses the camera to receive the positions – it does not tell the robots where to go, they do that themselves, like birds etc.
So they’ve cheated on the sensing, but not on the behavioural logic? I think that still counts as valid, then.
Still, most flocking is done in virtual space anyway. That is, if they still do much of it. It was something in the late 70s / early 80s (“boids” is a famous one I remember) that was big in the biomimetics (right word?), AI, and chaos theory fields. It’s interesting seeing what’s happened to a lot of the stuff that was gonna be around in the future, when I was a kid in the 80s. Nobody really saw mobile phones or the Internet coming, tho email was always due, from centralised dumb-terminal to mainframe services. We’re surprisingly thin on robot butlers too.
I’d guess that the research back then has presumably moved on, and borne whatever fruit there was. What are they doing with that type of research nowadays? I could look it up, but I’m fishing in case someone here happens to be an expert. Which happens quite a lot!
The apotheosis of this, for me, would be real-life combat-robot Robotron!
My guess is that at least one of the reasons geese end up in that arrangement can be found all over the ground where they land. Would you want to follow directly behind a goose?!?
Know why one side of a V of geese is longer than the other? There are more geese!
Ever wonder why a bear shits in the woods? Well, stick around – some clown will design an algorithm for a robot that explains it all. Yeesh.
if location() != “sleeping_area” then shit(current_location)
I’ll do that one next.
else shit(downwind_somewhere);
“Ya don’t shit where you eat”, sage advice in many fields of life.
If you’ve got to have a quote to realize that – you’ve got bigger problems.
Birds are not mindless robots that just do stuff. They have brains and can figure stuff out. They go in that shape because it’s just easier that way and the fact that they are very social is the reason why they are already together.