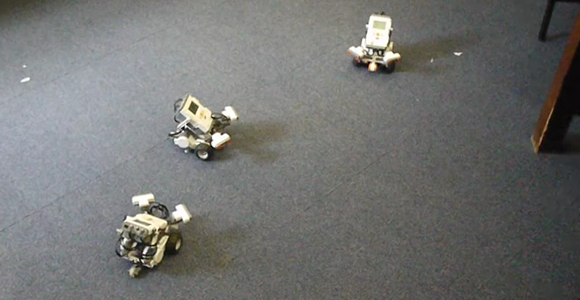
Do you ever wonder why geese always fly together in a V-shape? We’re not asking about the fact that it makes the work load much less for all but the lead goose. We mean how is it that all geese know to form up like this? It’s is the act of flocking, and it’s long been a subject of fascination when it comes to robotics. [Scott Snowden] researched the topic while working on his degree a few years ago. Above you can see the demonstration of the behavior using LEGO Mindstorm robots. That’s certainly interesting and you’ll want to check out the video after the break. But his offering doesn’t end with the demo. He also posted a huge article about his work that will provide days of fascinating reading.
We can’t begin to scratch the surface of all that he covers, but we can give you a quick primer on his Mindstorm (NXT) setup. He uses these three bots along with a central brick (the computer part of the NXT hardware) which communicates with them. This lets him use a wide range of powerful tools like MatLab and Processing to recognize each robot with a top-down camera, passing it data based on info harvested with computer vision. From there it’s a wild ride of modeling the behavior as a set of algorithms.