One of the persistent challenges in audio technology has been distinguishing individual voices in a room full of chatter. In virtual meeting settings, the moderator can simply hit the mute button to focus on a single speaker. When there’s multiple people making noise in the same room, though, there’s no easy way to isolate a desired voice from the rest. But what if we ‘mute’ out these other boisterous talkers with technology?
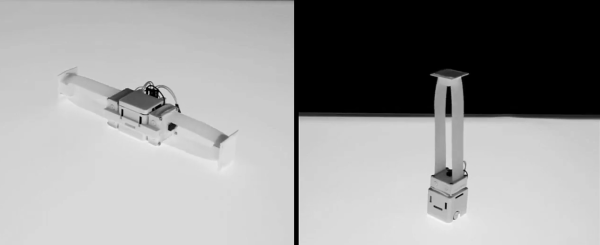
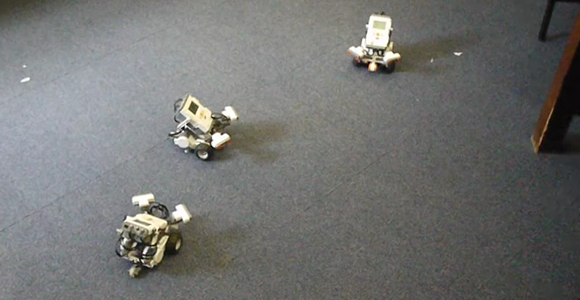
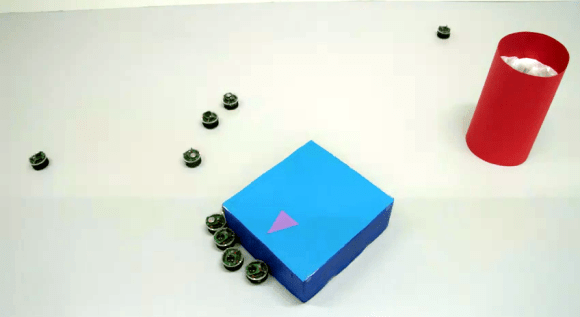
Enter the University of Washington’s research team, who have developed a groundbreaking method to address this very challenge. Their innovation? A smart speaker equipped with self-deploying microphones that can zone in on individual speech patterns and locations, thanks to some clever algorithms.
Continue reading “Robotic Mic Swarm Helps Pull Voices Out Of Crowded Room Of Multiple Speakers”