For one of [Aron’s] recent robotics modules at college he was tasked with building a small robot. He decided to make project Dodgebot, a cute and extremely quick robot that won’t run into things!
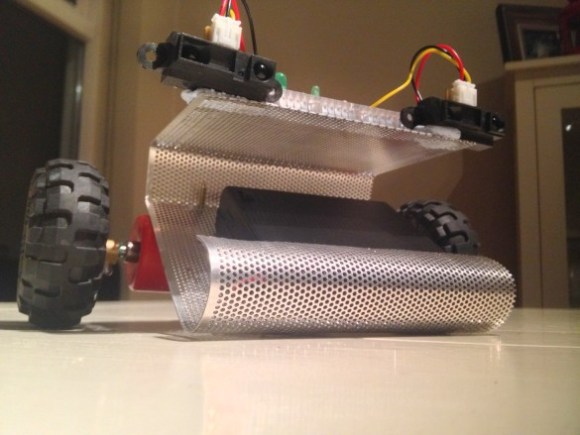
The body is made of perforated steel and supports the motor boxes with wheels (stolen from a toy perhaps?), two IR sensors, and the tidy protoboard on top to contain the electronics — seriously check out the wiring on it!
To control it he’s using an 18-pin dsPIC30F3012 and a SN754410NE driver. The robot works by detecting different states based on the distance measurements from each sensor, and then varying the output to each motor. It’s extremely quick and quite fun to watch as it seems to dodge everything in its path! See for yourself, after the break.
http://www.youtube.com/watch?v=yohauCuuijs
Hoping for a more evil robot? Don’t forget about [Rodney’s] laser toting robot that taunts the internet’s favorite pet…














I demand to see these in swarms :D!
The wheels are Lego wheels. They even have the little “+” makes inside the hub in your pictures!
Good spotting Nova, they sure are!
great looking bot, i like the fluid motion it is capable of.
it seems very consistent in where it ends up, which of course can be highly desirable, but i wondered if a “wandering” mode could be achieved, where the goal would be for it to reach as many unique paths as possible?
(what i am thinking is that it would be nice to see it in a more varied setting, it seems like a brilliant bot that deserves some room to move, that however is a purely egoistic desire to see the software deal with different situations, in short great job)
Sitting at a table suddenly evoked this thought: what if dodgebot encounters a thin vertical rod between its two sensors, like a table or chair leg? What happens in that scenario?
it (the dodgebot, not the chair leg) starts biting and chewing. Naturally.
I don’t think that’s perforated steel. Looks more like aluminium. I use these types of sheets for various things because they are easy to bend over cylinders of various diameters.
I want a bigger version of this to mow my lawn.. I mean it would look *terrible* but it would sure be fun to watch.
“If you can dodge a Dodgebot, you can dodge a dodgeball!”
Hahahahaha!