[Bart] stood upon the shoulders of the delta 3D printer giants and created this 4 axis delta router. The router was originally created for ORD Camp, an invite only hackers gathering. Each year he creates a new thing with one main purpose: to spark conversation. In his own words “Practicality and suitability are way down the list, so go ahead and snark away. If you do, you are missing the point.”
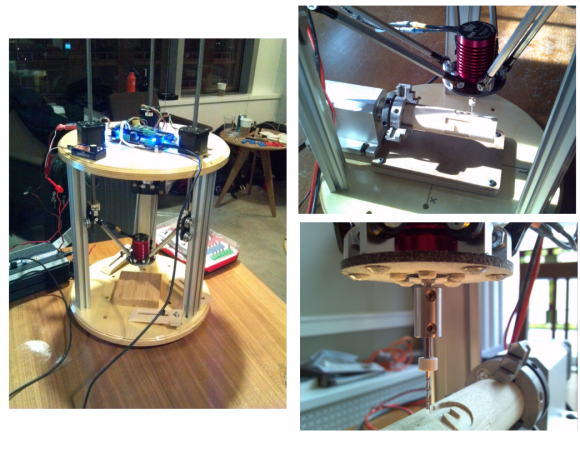
[Bart] did things a bit differently with his delta. For motors, he went with non captive steppers. “Non captive” means that rather than a shaft, the motor has a hollow threaded nut which rotates. A lead screw (usually with an acme thread) is passed through this nut. As the motor’s nut turns, the screw is pushed or pulled through the motor, creating a linear actuator. The only major downside is that a non captive stepper motor can’t be adjusted by hand. The screw doesn’t turn and neither do any external parts of the motor. For structure, the router uses MakerSlide and v-grove wheels. The spindle is a simple brushless hobby motor and 30 amp speed control. Rather than the outrunner motors we’ve seen lately, [Bart] wisely chose an inrunner motor normally used on R/C cars. Inrunners generally have less torque than their outrunner counterparts, but they make up for this in RPM. [Bart’s] motor is capable of 30,000 RPM, which is plenty for spindle duty. We think the motor bearings will probably need an upgrade, as the original motor bearings weren’t designed for side loads. For a controller, [Bart] utilized an Azteeg X3 running Repetier.
The router made a great showing at camp, and [Bart] decided it needed a 4th axis. He sourced a rotary axis from eBay. To keep the software simple, he connected the rotary axis to the extruder outputs on his controller. He was then able to hack the mach3 wrapped rotary post processor to output extruder commands. The results look great. [Bart] says the system definitely needs a tailstock, and we agree. We’re looking forward to the next update on this machine!
![]()














Funny side note that wasn’t mentioned.
Bart is the originator of MakerSlide. He made the stuff!
He has been doing lots of cool projects with it.
I also made a big makerslide delta:
https://vimeo.com/85790842
That’s a really clean looking design!
You might be right about the bearings, but it’s the axial loads, not the side loads, where I’d expect to see a problem. Those motors are designed for gearbox use – don’t typical gearboxes (other than planetary) result in a pretty high side load on the motor shaft? With a pinion and spur arrangement (typical for RC cars) delivering all the torque to one side of the motor, it seems like the bearings would have to resist the torque value divided by the gear radius. Those bearings can’t take any real axial load, because they’re not designed for thrust applications, but you could work around the issue by trying to avoid plunge cuts as much as possible.
You are right, there is probably a lot of slop axially in the motor. But with that coupling that is probably the last thing I would worry about. Set screws don’t work well with carbide bits unless you cut out a groove for them to grab in to.
As long as he is doing wood or foam it will probably be ok. Anything harder… forget it. Not only because of the “spindle” but also because of the lack of rigidity of the machine.
Out runners must be delivering most of their power via trust since they usually drive a propeller and I guess the bearing are similar
I just looked up the rating on a random 4mm ID 12mm OD ball bearing,
35kg radial, 32kg axial
I have to bite my tongue and remember that this has to be one of those ‘Just because I can’ projects. The mechanical engineer part of me is cringing as I think about how not suitably stiff that mechanism is for doing any kind of machining where you want to hold a reasonable tolerance of any sort. Neat idea though, and properly executed, could yield a really useful and unique machine.
Bart just loves his tiny deltas.
WHAT?!? I did not know these “non captive steppers” exist – yet they´re EXACTLY what I need for my current project! Can anyone PLEEEEASE tell me where I can get them in Germany? Thanks a lot!
Most companies that make steppers make these kinds of motors as well.
I got some from http://www.lawicel-shop.se that should work for germany. The things is; there are not that powerfull, because they 12V you can’t step them very fast, there is quite a bit of slop it the thread so you get backlash and you can’t just put in a new threaded rodin, it is a special dual start thread
That is an interesting combination of technologies. I too had not seen non-captive steppers before. Also I found that small (conventional) stepper powered “lathe” type object to be an entirely fascinating thing, despite the presumable lack of torque or resolution.
I shall peruse the ebay for such magical items.
Really elegant solution.
The only problem I can see is those non captive motors waste vertical space. If you want small workspace, it’s ok. If you want larger, you need to have a room taller than twice the hight of the delta router.
True, unless you mounted the rods statically on the frame and have the motors moving up and down them with the mill ead attached to the motors somehow. That would be worth trying I reckon.
That means wasting a lot of energy moving all that mass though. If space is at that much of a premium I’d think there are more elegant solutions
depends on how you use them, if you make the motor ride up and down a stationary thread instead of a thread moving up and inside a stationary motor you need no extra space
I never knew Mach3 could handle hexapods. I learn something useless every day I guess. BTW LinuxCNC handles 6 axis stock. I think that is all there is in relativistic space. When we crack the 4th dimension you can bet that Linux will handle it first too!