“Its hard to find people that actually WANT to mow their lawn.” A more true statement has never been made. [Kurt’s] project turns an old lawn mower into a remote control lawn mower.
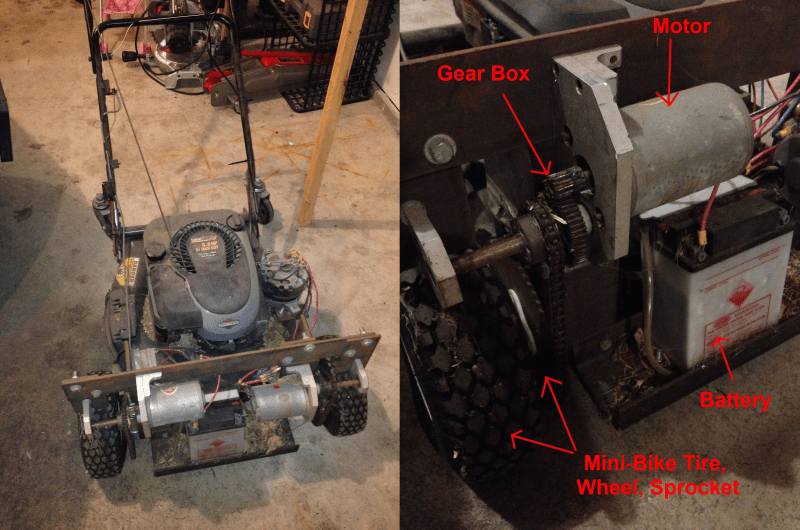
The first step of this build is to replace the front drive wheels with mini-bike tires which have built-in gear tooth sprockets. The rear wheels were then replaced with large caster wheels. The 12-24V DC motors and gear boxes used come from National Power Chair. While we have seen more complicated RC lawn mowers before, this project is a great way to get started. All that [Kurt] wanted was to make lawn mowing more fun, we believe that he has succeeded. This thing is very mobile and can turn on a dime. Check out the demo video after the break.
What’s next? Add a GPS, a Raspberry Pi, and a few other odds and ends. Tie it together with some clever programming and you will have your own autonomous lawn mower. Have you already created a completely autonomous lawn mower? Let us know!














Clever and sturdy looking build. But, of course one must ask: What could possibly go wrong? Don’t tell Jeff Fahey!!
The autonomous part would be easy to solve: Just take the logic out of a Roomba!
Unless something has changed recently Roomba’s still run around and bump in to things to know when to turn around. It’d be very hard to stop this thing from going rogue down the street eating puppies/small children along the way using Roomba logic. I think the better solution would be to write a program specific to the yard or to set up something like with invisible fences for dogs.
Grass is the most useless thing in the world so kudo’s to anyone that can get it out of our hair (seond most useless thing in the world),
Because clearly, erosion isn’t a thing.
You’d think with all that watering and throwing away the grass clippings, that the leaching would be even worse than surface erosion. Meh, not like grass is the ideal plant for a lawn. That’s some weird marketing nonsense that people fell for.
Nice build, now all that is left to do is automate it so he won’t even need to control it! Phaux has the right idea, use the guts of a Roomba,
Ah, but when the zombie apocalypse comes he’ll be mighty glad he has that remote, BZZZZZZZ, scratch one muncher!
I would rather see the mower pained bright read and computer vision used from a camera perched in the air (quadcopter?).
Why would you need to add a RasPi if you were going to add GPS? Yet again proving that the RasPi is nothing more than a solution looking for a problem.
Also it makes me wonder if it would have been cheaper/easier to modify a self propelled or riding mower than to go through all this work to propel a push mower. Those motors and extra equipment isnt exactly cheap, even used, and i’m sure craigslist or yard sales would have a better mower available.
“Why would you need to add a RasPi if you were going to add GPS? Yet again proving that the RasPi is nothing more than a solution looking for a problem.”
Probably because there probably isn’t a GPS that can drive lawn mowers out of the box. It doesn’t have to be a RasPi, but it would need to be some kind of processor board to work with location data.
Thats funny you would write about that.. You can get very precise location data using RTKkit. The new Navspark supports it.Lots of people use it in agricultre which is similar. Check out the FOSS-GPS list http://lists.osgeo.org/pipermail/foss-gps/ or RTKlib.com
I’m awaiting my NS-RAW pair of navspark’s for this exact purpose, but I’m planning on running a beaglebone black. I’ve had a remote mower for a couple of years, finally a cheap RTK GPS option to try upgrading it with.
Or you can go (relatively) low tech and use a method like for grocery store carts and shock collars. I think you could just bury a wire on a pre-planned course to control directions, along with some kind of object detection kill switch. Probably a bumper and tilt switch? Of course, knowing Hackaday, we’ll use a airbag deployment sensor from a junk yard. ;)
A RasPi can’t drive a lawnmower out of the box either.
And because you missed my point, do you really need a 700Mhz ARM CPU and GPU to process GPS coordinates, and to control a couple of motors? For what everyone uses it for, it is grossly over powered and unnecessary.
To get centimeter level accuracy you have to do RTK which is much more processor intensive because a raw data capable GPS moves much of the processing out of the GPS chip into the CPU’s FPU.
A RPI is actually about the right price performance tradeoff for something like a small, slow autonomous vehicle.
I could see it as being fairly easy to make an autonomous lawnmower using RTK (farmers use it all the time now) but you would want to keep an eye on it as it did its work.
It looks like I misread your original comment, but I also think the original point made was incomplete.
I don’t see where a RasPi is unreasonably overpowered by default, but it’s possible it’s still not quite the right tool for the job. Depending on what other features the person wanted to add to the project, going with a less powerful platform might be limiting. The cost of a RasPi is pretty low as hobbyist boards go, too. I guess it would help to know what board you would suggest in its place.
dolomite, why would you need centimeter level accuracy for a lawn mower with a 18-24″ inch blade? You just have it overlap on each pass which you’re going to need to do anyways even with centimeter level accuracy.
JRDM, a 700Mhz CPU and 512MB RAM to process some GPS data and control a couple of motors isnt over powered? How poorly written would the code need to be to require that? And as far as the cost of hobbyist boards, you can get PIC MCUs for free and making a PCB yourself isnt exactly expensive.
With meter level accuracy of regular GPS, you’re not going to get coverage with a 24″ blade.
It’s not about efficient programming, or requiring the extra power, IMO. You never know what other features you might want to add that’s precluded if one specifies a chip too tightly to a given task.
I’ve done PIC in the past and I’m not interested in touching that again. Making your own PCB is cheaper only if you don’t count the value of your time. Save that time and work on the actual problem.
Without RTK, you’re not going to get good enough accuracy even for overlapping. RTK isn’t going to fly on an 8bit micro. Besides, you could do a lot nicer stuff with more CPU, like a touchscreen remote to drive the works in auto/manual and screen perimeter mapping.
Guys but most “hobbyst” can make couple motors + geared wheels respond to RPi but they cannot make custom PCB…
Also if you are newbie or you just do not want all that microelectronic stuff you go this way:
Find “how to power a DC motor by Rpi”
Than you go “How to use GPS and Rpi”
and than finally you go “How to use DC motor and GPS by Rpi”
Couple attempts to fix your own code, couple burned parts later,
and you got your lawn up and running without any special PCB mills or ultra geek processors.
A friend has a autonomous mower, it tends to get stuck in holes spinning it’s wheels.
The first Mobot was in 1965! It used the dog “fence” tech. Craig’s had a free wheelchair the other day, I didn’t think about this at the time. They said the joystick was broken. Would have to have different tires.
He/she should fill in the holes so its relatively flat.
You should’ve jumped on that free chair offer. The motors and wheel combos alone are worth $100.00 each; the joystick by itself is a pretty nice bit of kit, too. The only downside about such a deal is storage; chairs take up a bit of room. Putting new or different wheels on a chair isn’t too difficult if you have some metal working skills; adaptor hubs and such to connect cheap 10″ lawn/garden wheels can be had fairly easily, or you can fab things up if you have the original wheels available. Even replacement wheels/tires can be found if nothing else (though they tend to be expensive).
Looks good. The only thing I could fault it for at this point was the wheels are now much wider than the cutting deck meaning the mower can’t get to the very edge of the lawn. No biggie just means more edge trimming. Gotta do something to get some exercise if the law mows itself :-)
Forget about the GPS, most affordable chips aren’t nearly as precised as they should be for this job, you’d need something precise down to 50cm tops, otherwise the mower would end up mowing flowers and going off-course
Yes, you will need some differential GPS, paired with a local hub (or hubs). There are other options as well, which may be suitable. I remember there was a company called “Q-Track” that has good accuracy local location systems. They appear to be still around. Maybe they have a dev kti.
RTKlib-caabe hardware can get down to 2-4 cm accuracy.
I stand corrected!
It’s possible, but compared to some tutorial showing how to interface a ~50$ gps chip to a dev board, that’s waaay too complicated for me :'(
Cool! Attach a creepy-looking mannequin behind it for extra fun!
Don’t even do that. A lawnmower is the most inconspicious item in modern times. Depending on your neighbourhood, this could edge its way up the street without detection, spying through the livingroom windows of all your foes. If you’re into that type of illegal activity that is. Which i am not.
I’ve got an Exmark Viking walk-behind that’s hydrostatic. I’ve been trying to source a servo that can push the valve levers open or closed, but I can’t find anything with the torque necessary.
try doing something with a wormgear motor and an encoder or some endstops. I doubt you’ll find a hobby servo that can deliver the kind of force you need
wormgear motor such as a car window motor
Man, I came here looking for a home-made tiller. I’m thinking that broken hoe and rake could be visiting a welder and weed eater in the future… The most economical method is to make a weed-whacker adapter with weighted-wheels? It would be awesome to have even a small edger and cultivator mod for <$30 of scrap parts!
I guess the race is on to either post it myself or someone to beat me to it. GL!
I am the type that enjoys taking care of my lawn. I think that to properly mow your lawn you have to be in control with the mower in your hands. It is the only way you can cut it the way it needs to.
Please inform people who see this where we can get the kit. It is listed on the link $100
And I will take three.
why the focus on GPS for positioning? can’t there be some sort of reflective sensors on key boarder areas be setup and a laser used to calculate the distance and positioning? I mean if its a free range mower, doesn’t it need over powered lasers to keep it safe? idk just feeling confused about this as maybe spinning lasers would be more attention getting (like I said for the safety of course)