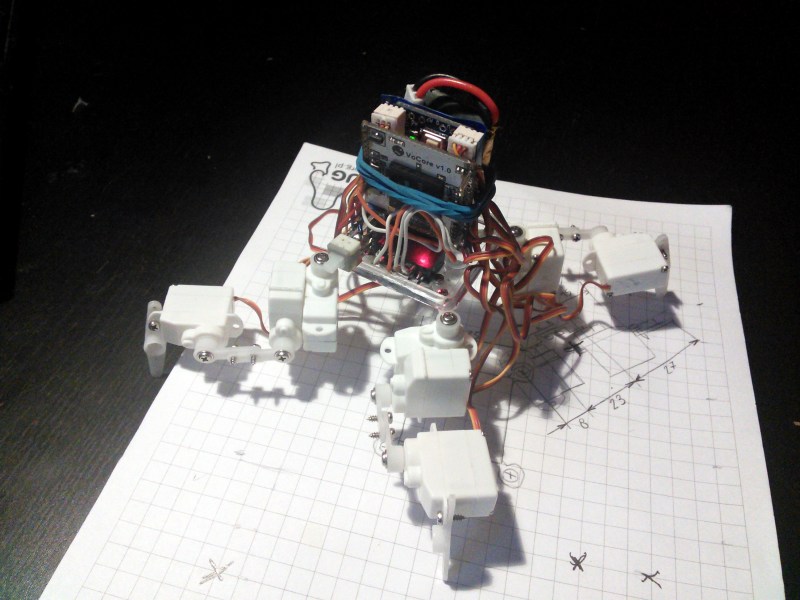
Most of the legged robots we see here are of the hexapod variety, and with good reason. Hexapods are very stable and can easily move even if one or more of the legs has been disabled. [Radomir] has taken this a step farther and has become somewhat of an expert on the more technically difficult quadruped robot, building smaller and smaller ones each time. He has been hard at work on his latest four-legged creation called the Pico-Kubik, and this one will fit in the palm of your hand.
The Pico-Kubik runs Micropython on a VoCore board, which allows for it to have a small software footprint to complement its small hardware footprint. It accomplishes the latter primarily through the use of HK-282A Ultra-Micro Servos, an Arduino Pro Mini, and a tiny lithium ion battery. It’s still a work in progress, but the robot can already crawl across the tabletop.
This isn’t [Radomir]’s first time at the tiny quadruped rodeo, either. He has already built the Nano-Kubik and the µKubik, all of which followed the first (aptly-named) Kubik quadruped. Based on the use of SI prefixes, we can only assume the next one will be the hella-Kubik!














Nice, I like how he has kept the hardware simple (and scratchy) by just using servo horns, PCB and screws.
I personally think this is a little too big to be called pico, but you’d probably need to drop the off-the-shelf servos and go with tiny gear motors with your own feedback loop to get much smaller!
AWWW its sooo cute when it walks !!!!
http://www.youtube.com/watch?v=uTGFulDR2lg
looks like a drunk trying not to fall off the floor bless it :)
It needs rubber balls on it’s feet. Other than that, very sweet build!
it’s really cute! Nicely done.
Piccachu Rubik what?