Human ancestors have been walking around on two legs for a few million years. We’d imagine that by now we’ve figured out a pretty efficient mechanism for getting around. Unconvinced, however, researchers at Carnegie Mellon University have developed an “exo”-boot that reduces the metabolic rate of walking by seven percent. Best of all, the mechanism requires no additional source of active power input besides the human legs that are wearing them.
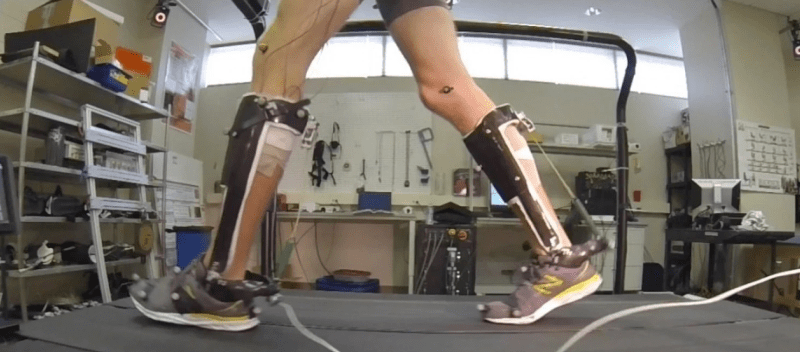
Upon close inspection, the boots reduce the overall applied torque at the angle joint at a critical point where the heel begins to lift off the ground. Energy in, energy out. The spring ratchets to a loaded position as the user plants their foot. This ratchet releases, re-engaging the stored spring force as the user brings their heel back off the ground. A seven percent reduction in metabolic rate may not sound like much, but, according to the paper, it’s the equivalent of about four kilograms less weight in your backpack on that next hiking trip.
As for what specific costs are being reduced to lower the body’s metabolic rate, the researchers still aren’t completely sure. An off-the-cuff look at the joints and moments from a mechanics perspective won’t give us a sure-fire answer since the energy consumption processes of muscles are, well, complicated. In fact, by varying spring stiffness in their design, they discovered that springs that were either too stiff or too loose had no effect on the metabolic rate. Yes, they’ve certainly stumbled on a sweet spot in terms of well-mixed circumstances, but the answer behind why the new robot-legs work so smoothly will be a study for the future.
If you haven’t jumped into the world of exo-skeleton building, let [James Hobson] be your guide into pushing our bounds with homebrew mechanical advantages. Now let’s keep our fingers crossed for some long-fall boots.
via [The Washington Post]














Now all I need is an Aperture Science Portal gun and some handy test chambers to try them out in
Interesting concept – but the squeaky noise would send me mad ….
Yeah, you’ed never be able to sneak up on anyone either.
Hopefully that noise is just an issue with the prototype, maybe it can be refined to be quieter in the next revision.
For anyone interested the full article (sans paywall) can be found here:
http://biomechatronics.cit.cmu.edu/publications/Collins_2015_Nature.pdf
There also appear to be some other articles that may be of interest as well:
http://biomechatronics.cit.cmu.edu/publications.html
Good links! Thanks.
What it needs is to be self adjusting to the ‘sweet spot’ for the wearer, and to also adjust for varying load, speed and other factors.
Now add to it a small generator to power your portable device so you cant hear the squeak and we are set :)
Funny, I’ve always wanted to design something that would *increase* the energy required for walking.
Actually I believe that walking without this exoskeleton is still the most efficient way, at one condition : you need to walk bearfoot ! Indeed when you walk bearfoot, you are walking in a different way than with shoes, you first hit with the tip of your foot and then with your heel, with shoes it’s reversed, first heel than tip. And we also know that our calf is used more when you walk bearfoot, because of this different walking style. The thing is every muscle has an tendon which acts like a spring (i think it’s the tendon, maybe something else but i’m sure that there is an organic spring) and help with repetitive movement, that’s why when you do push ups you should wait at the end of the movement..
And I think that’s were the 7 percent are lost, in our calves which aren’t used due to shoes.
I’m absolutely not an expert in biology, it’s just what I can put in relation with all what i read, if someone can correct me, he is welcome !
(Sorry for the english, not my mother tongue ! )
I’m certain your English is better than my 2nd language (i can order beer and ask for the restroom in 4 languages…)
as a helpful tip, it’s barefoot, not bearfoot. because ‘bare’ is a synonym for naked, rather the the large mammal ‘bear’ There’s quite a bit of a debate of barefoot vs clad, and even some lawsuits that have occurred (five-finger shoes most notably)
Oh I didn’t noticed, thanks for the correction!
Personaly I really think that walking barefoot or with five-finger shoes, give us some benefits, maybe not 7%, but we are made for walking un this way, so..
I walk a lot barefoot and the sequence is the same as when I walk with shoes: first heel then tip of the foot (except on ways with lots of little spiky stones, then I walk in a crippled way on tip only). I can say that you train your muscles and tendons better when you only go barefoot but I’dont think you get 7 percent more efficiency just by taking of your shoes – you have to train your “barefoot-skills”
Thanks for sharing your experience, it’s true that 7% sounds a lot!
Thera-band would be a great sinew for this application.
One thing that’s probably helping a lot here is that their levers have a LOT more leverage than muscles do – muscles are incredibly strong, but are made many times weaker in humans by their short lever setup (which is necessary so that they can fit inside you, rather than sticking out as long cables between parts of you). Since their lever system extends further back than the heel, it seems likely that the setup probably tensions the spring system when the heel is in a better position to apply leverage, and that applies an additional force on the longer lever when the heel is in a worse position for leverage.