There are a few 32-bit ARM-based 3D printer controller boards out there such as the Smoothieboard, the Azteeg X5 mini, [Traumflug]’s Gen5 electronics, whatever board is in the Monoprice MP Mini Select, and several others I will be criticized for not mentioning. All of these ARM boards provide smoother acceleration, better control, and ultimately better prints from whatever 3D printer they’re controlling. Now, out of the blue, there’s a new board. It’s an evaluation board from ST — much like those famous Discovery boards — that sells itself as a plug and play solution for 3D printers.
The heart of this board is an STM32F401 — not the king of the STM32 line or the fastest ARM microcontroller, but anything faster or more capable will add considerably more to the BOM for this board. This controller board features six of ST’s L6474 motor drivers with enough current for some beefy NEMA 23 stepper motors , a multi-zone heated bed, and connections for a WiFi module and external LCD and keypad. You can buy this board right now for $118. This board isn’t a game changer, but it is evidence the game has been changed.
As with all 3D printer controller boards, there are a few aspects that will leave users wanting more. This is a board meant for 12V heaters (except for the bed, which has a 24V, 20A output), and the stepper drivers can only go up to 16 microsteps. That said, there’s not much else to complain about. This offering comes with a 32-bit firmware called Marlin4ST. From a quick perusal, it looks like the familiar configuration.h is still there, and still does what it’s supposed to do.
This ST Discovery board is extremely capable, available now, and relatively cheap, but that’s not really the big story here. What this board represents is a reference design and working firmware for a 32-bit ARM-based printer controller. That’s the future, and with this board the future might come a little sooner.
Thanks [jagerboots] for sending this one in.














Smoothie has been ported to stm32, so that’s an option for firmware too : http://smoothieware.org/third-party-branches
does anyone know if its going to be possible? It would be quite a useful board if it is.
The port of smoothieware has been done with an F411 controller, but from what i know, that is a really easy port down to the F401 from the ST board. At least if the firmware is not using peripherals the F401 does not have. If you know your soldering, swapping the F401 on the ST board for an F411 should be possible too, since they are usually very pinout-compatible.
The hardest part is probably to fully support the L6474H stepper drivers properly in smoothieware. The drivers do work with DIR and STEP signals, but they are all on the SPI bus too for configuration and status report. You would probably have to adapt and merge some parts of the evalboard firmware into the smoothieware. Should not be too hard for someone who has worked with STM32 controllers and/or the smoothieware before.
I saw this in a recent email from ST. I’m a fan of the Smoothieboard and have even made some very small contributions to the code. Competition from one of the big players will be tough though.
I’m ready to replace the super-annoying proprietary controller (LightObject LO-X7 DSP) in my rather high-end laser cutter/engraver, and have been looking at Smoothie (which, alas, is not yet a good engraver). Had been thinking about springing for a Smoothieboard 5x, but perhaps it’s worth waiting to see what happens with this one. Or maybe I’ll just put several controllers in the thing with electronic switching between them, so that I can just use whichever board is the best at any given moment. :-) Any suggestions for other high-end controllers to consider?
Users have had good results engraving with smoothie. I think the only downside left is depending on the actual engraving speed somothie might be limited in some setups, but that’s it.
I believe that’ll be solved with v2.
Copying and distributing free software is very cheap. For free hardware, it is different. For hardware, the price depends on how you distribute and how many copies you make. Also meaning that it depends on how much money you are willing to spend in advance and how much support effort you have to spend on average for each single unit. So, “community hardware” and “free hardware” are NOT the synonym for cheap hardware.
Look at the ST boards: There are basically no other boards on the market with similar value/price ratio. Here, it is the same. ST doesn’t really want to get into 3D-printing and they don’t want to make their money with selling boards. They want to sell their parts. And this is just a good way of doing so; a wisdom many other manufacturers have failed to recognize so far.
All that being said: This is not the reference design. This is the final solution, if it serves the needs.
Yah the IBM PC was basically an Intel reference design (HBD)… So for a few years we’ll be singing its praises then in 20 be cursing its limitations as everything tries to be backward compatible.
Hardly likely. In 20 years, your 3D printer might have more than 4 Gigabytes of volatile memory. This is hard to handle with those 32-bit STMs ;)
Because an 8088 handled 16GB DDR3 back in the day…..
Or another prod… “640K ought to be enough for anyone” … sound familiar?
You are missing my point or I am missing your point. You were talking about limitations of 3d printers in 20 years because stm32 becomes the quasi-standard today and someone will try to keep backward compatibility as it was the case with the IBM PC. I am saying that this is ridiculous because the stm32 architecture cannot provide the features a 3d printer will have in 20 years and for a lot of other reasons too. Free compilers, free SW and HW, faster development… You can’t even run a nowadays linux-distribution-standard-kernel on a yesterdays notebook.
I’m starting to wonder if you’re trying to be funny. IBM didn’t trot out the PC based on a reference design with anything more than the needs of the immediate future in mind. Over the years various kludges and workarounds made it address more than 1MB of RAM, then more than 16MB, then more than 4GB, etcetera.The expansion buses became 16 bit, then 32 bit… again kludged on top of the basic architecture..none of this was planned very far into the future, it was all done on a “needs must” basis to drag the thing kicking and screaming into the next decade, to keep it alive and up to date… Unless you’re telling me that in a 1981 project meeting sometime they were sitting around going, “No, No, No, we can’t do it like that, it won’t be able to run Windows 10…”
Anyway, whole point being that a useful reference design can become ubiquitous and (annoyingly) persistent, and end up being stretched and contorted wayyyy beyond the bounds of it’s intent, kludged, patched and jury rigged through life to keep it going, due to installed base, software and hardware support being so monumental that it seems unthinkable to kill it and start fresh.
Processes on 32-Bit-IBM PCs can’t really access more than 4GB of RAM. Please put this new (very old) information in perspective to what I wrote previously. Even more, it is hard to address more than 4GB with 32-Bit CPUs at all. Not impossible but so hard to handle so that people immediately dropped this approach, once those memory sizes became main stream. Exactly what i wrote: “hard to handle”. No 32-Bit Windows with 16+x GB memory for mainstream. Now, the 64-bit systems don’t execute 16-bit code, they emulate.
And as I also already pointed out: Back in those days, no Linux existed, no FreeRTOS, not even a really free and powerful mainstream compiler. This is the past and it will never come back. Today, we have open-source 32-bit CPUs with gcc, ARM-machines running standard linux-distros a.s.o.
Nowadays, it is not that you are scared of a standard, you chose on purpose a system (such as raspberry pi or linux distros), where you hope to have support for a minimum period of time. And you hope that the system you spend time and money on is not obsolete tomorrow or its community
is not dead tomorrow. This is the opposite from what you are talking about regarding IBM PCs 20+x years ago.
“”You can’t even run a nowadays linux-distribution-standard-kernel on a yesterdays notebook.””
“”Processes on 32-Bit-IBM PCs can’t really access more than 4GB of RAM. Please put this new (very old) information in perspective to what I wrote previously. Even more, it is hard to address more than 4GB with 32-Bit CPUs at all. “”
Because standard modern linux kernel binaries require a minimum of PAE support, introduced with the pentium pro, so limiting use to notebooks newer than about 1998 (Weren’t really many P-Pro notebooks around apart from a few spendy ones for high end CAD users, so we’ll figure from when PII notebooks were mainstream.) However you can still build from source for older targets if you really want.
PAE funnily enough is one of those weird little kludges grafted on to 32 bit x86 CPUs to add an extra 4 bits of addressing support to extend addressing range beyond 4GB. Reasons why you might not be able to use this amount of physical RAM include hardware, motherboard and software limitations due to legacy factors.
So where are we? Do we need to get up a change dot org petition to Raspberry Pi foundation to demand the RasPi 3 be killed with fire because it’s an unholy 64 bit abomination of a system that was originally 32 bit and therefore an unpossible development violating the the 3rd law of thermodynamics or are we cool now?
“RW says: July 19, 2016 at 11:13 am
Yah the IBM PC was basically an Intel reference design (HBD)… So for a few years we’ll be singing its praises then in 20 be cursing its limitations as everything tries to be backward compatible.”
After all these posts and after you mentioned yourself that even the relatively long-lasting raspberry SBC already switched from 32bit to 64bit: Why did you make the statement in the first place, that a nowadays STM32 architecture might become a pain in the neck in 20 years if we use it as one standard among others for 3d printing today? Why do you give the example of the IBM PC for comparison, where the STM32-board is open source, the 3d-printing firmware is open source, STM32-similar architectures are open source and the functionality that STM32 provides for running the open source firmware is replaceable in various ways (e.g. by switching to other nowadays or future architectures)?
One needs to understand the PC in context, when it came out all competitors were very closed, and the IBM PC for it’s time was very open, the full and copious technical manual had commented BIOS source, even though it was still copyright. It was based on non-proprietary parts. Also while the open source software movement hadn’t taken off yet, OS were more simple and the OS market was vibrant, many competitors, many hobbyists with their own brews, IBM at first was OS agnostic and promised not to lock users into any one OS. It was far from clear that the Microsoft’s PC DOS 1.1 would become the dominant OS. CP/M was the reigning anointed king and ran on several platforms had huge application support, and that was available for PC. Anyway, apart from the BIOS code copyright everything else was open and well documented, the first clone appeared 6 months after release, and after the update to fully 16 bit with the introduction of the PC AT, IBM rapidly lost control of the platform as it’s popularity exploded.
With full knowledge of context, I say therefore that STM32 is in a comparable situation to the IBM PC at time of release, big manufacturer, new market dominated by others, open design, variety of software options, easily cloned. So I’m saying it has all the ingredients for success, but it’s a case of “careful what you wish for” since a wild gain in popularity will build a momentum that will crush more optimal competition years down the road. That being said, it may however drive the market, with a more optimal architecture we might not have had demand to drive development of multicore multi ghz CPUs, we might have all been happy plodding along on 1Ghz RISC cpus if x86 had never been, or never become dominant, or the market had been more fragmented. So maybe x86 has overachieved in that sense, even though it’s less efficient, the sheer mass of its market has allowed it to be more highly developed then anything would have been if it had been a multiway split between half a dozen architectures and more platforms. But even a mere decade into the PCs reign it became apparent that it was a bit of a Faustian bargain … http://world.std.com/~swmcd/steven/rants/pc.html which continues through the years to pose problems http://www.sciencedirect.com/science/article/pii/S1383762104000815
Regarding hardware: the ST-Nucleo 401re dev board is about 18 CAD (14 USD), and it would only take a small pcb to adapt that to a RAMPS board. Before anyone describes the futility of that per usual HaD comments, I have literally done just that, porting the Teacup firmware, and adapting the STM32F401RE to a $5 Chinese Ramps board. It can be done. The article is on point; there is a reference design now. It does lack wifi, and only has FIVE stepper drivers, and those require you to get Pololu DRV-8825’s, but it is out there.
What is neat about this, is that it would be fairly easy to change the Pin defines as most st32’s have super-duper versatile pins, and adapt it to pretty much any controller-prosthesis.
I will be, and I hope others are, looking into porting this to those $2.50 stm32f103c8t6 dev boards from aliexpress there were referenced in an article on HaD a week ago.
Just found this comment.
If done the port of Teacup to a Nucleo F411RE. It was not that hard and is working quit well.
Porting to other Nucleo’s or STM’s shouldn’t be so hard. I’ve taking a CNC Shield V3 which is pin compatible to the Uno layout which is also on the Nucleo boards. As this is without mosfets for heater and voltage divider for hotends, it is also pretty simple to make a breakout board.
http://forums.reprap.org/file.php?181,file=82542
https://github.com/Traumflug/Teacup_Firmware/tree/arm-stm32f411-port
Quote: “a wisdom many other manufacturers have failed to recognize so far.”
So, who are those manufacturers you refer to? I can get eval boards from all the big players in the semiconductor industry and for a heap of different parts and applications. Sometimes they only design an eval board without actually putting it in production tho, like some of TIs reference designs for example. If you have a company behind you and are in direct contact with the big distributors, you will get a lot of these eval boards for free as “promo material” too. Just make them believe that you potentially order tens of thousands of parts per year once you go into production…
Even if you have to pay for your eval boards, you can get good deals from Freescale/NXP, SiLabs/EnergyMicro, TI, Infineon and most other Cortex-M integrators.
I’d be concerned about the stepper drivers being so close together, but it’s their drivers and their board, hopefully they have that right. The 12V limitation is a dumb one though, that limits motor performance in a way you don’t want when you have a 32 bit controller running it. I don’t mind a mixed 12V and 24V board but the way they describe it sounds needlessly rigid. There’s at least a couple boards available that will let you run 12V and 24V devices in a more flexible manner, the ones I know are smoothie and RUMBA.
The Marlin firmware is long in the tooth with no indication of updates to its now-crude acceleration profile, unless ST has done big changes without mentioning it. Marlin’s planner was fine in 2012 but it’s crude now that machines are generally better built, showing the limits of firmware’s algorithms. I think ST should have used the smoothieware port, which is a step or two better on the acceleration profile and generally much better in configurability. I wonder if they didn’t want to lend any aid to the mbed platform at the expense of their own tool chain.
As it is, it’s competition but not to the level it should have been. At the moment, I’m eagerly anticipating the Printrboard G2 with Synthetos’ TinyG2 firmware and motion planning. Better than S-curve acceleration profile allows for faster motion that’s smoother to boot. If that doesn’t pan out, for one reason or another, I’ll just continue using smoothieboard.
I realize they’re pitching this as an evaluation board but I fear it will be treated as a reference board.
When I say flexible about 12V and 24V, the same board can control devices at both voltages at the same time. RUMBA has a built-in 12V buck converter, smoothieboard lets you add power supply rails within reasonable power ranges, I know 12V and 24V, maybe higher and maybe lower too.
I think the remark about not using mBed is dead-on. Ah, politics …
Changing some caps and a few other components could change the drivers to allow 24V. The extruder heaters and fans would have to change to 24V as well.
Actually, the first thing that came to my mind with this board was the question “does it run on 24V or not?”. After i’ve seen that they designed it for 12V operation, the next thing i am looking at right now is to disect the schematics and see if it is actually possible to just change a few components and get the full 24V support. In theory, it should not be too hard. I just don’t understand why ST went with 12V.
You could probably even swap the controller for something more powerful from the 400 family (or go 700?) if you really need it, the STM32 family is usually quite good at keeping pinouts compatible for a given package size.
Still too damned expensive when compared to ATMEGA based solutions. Given you can pick up STM32 processors for less than an ATMEGA these days they’re doing something wrong.
compared to *what* atmega based solutions ? a legit ramps or rambo or rumba is more expensive than this.
If you are talking about out-of-specs-counterfeit-components-too-thin-copper-ramps-counterfeits commonly sold for just a few $, well the problem is in the name …
I’m not sure where you’re doing your shopping, but you can buy a quality RAMPS board (from a manufacturer linked from the RepRap site, there’s no such thing as an official RAMPS board) for $30, a PrintrBoard is $69 direct from the manufacturer and a Sangulinolu for $59. Chinese RAMPS clones can be had for $30 including an Arduno Mega 256 clone and a set of Pololus.
I was talking about the $30 “full kits”. Those will burn your house down.
Also, “linked from the reprap site” means nothing. The admins here have been battling for years against spammers for crap products they would love to get the site rid of, but it’s a fight they can’t win. They just keep coming and coming …
Those $30 ramps appeared one day, and the complaints of dead/broken/burnt RAMPS completely exploded in a few weeks, and it’s just “normal” day to day stuff now.
Sanguinololu is a known failed design. There’s a reason it’s not used anymore. Printrbot never took of, though it’s probably one of the best ones you mention.
I’ll admit that I was wrong in that there’s an “Official” RAMPS in the form of the Ultimaker board (as they seem to have designed the original), but the point that I was making was that you could get a decent quality 3rd party equivalent, no corners cut, for less than 1/2 the price and the Chinese corner cut version for 1/6th. Ultimaker are selling their boards at a huge markup. The vast majority of printers using RAMPS use these mid range clones and don’t have significant problems with them (or RAMPS would be a “failed design”)
The Sangulinolu isn’t too popular, purely because of price and capability. It uses the DIP ATMEGA128 which makes it one of the few boards that can be built at home by most hobbyists, but limits its storage capacity.
It’s ultimachine, not ultimaker :) Ultimaker exists, but it’s a different thing :)
And yes, there are RAMPs that are cheaper than Ultimachine, but the ones that are $30 for a full kit will burn your house down, and the ones that won’t burn your house down are *at least* $100 ( again, for a full kit ), last time I checked.
Also, sanguinololus have several design flaws, including some too-thin copper traces that cause boards/connectors to burn up, which is why it’s stopped being recommended years ago, and is used by nearly no-one today.
On that subject, you might find this interesting : http://reprap.org/wiki/Talk:Comparison_of_Electronics
Ultimachine builds in the US with actual quality components, built by the guy that designed it. Just calling it hugely marked up is really being ignorant of how well-built they are. He doesn’t use lower spec components to just to fit a price point. There’s reasons why several 3D printer manufacturers use their genuine boards, including Prusa himself, Lulzbot, MakersToolWorks and so on.
But that’s a bit besides my point. I think you’re missing a lot if you refuse to even consider other alternatives on price alone. It’s time to move on from RAMPS. It’s limited, it’s awkward, it’s bulky, and it’s been superseded four years ago. The next generation RAMPS is the RAMBo. RAMBo is a tough, well-laid-out board that makes RAMPS look like the jalopy that it is. Then there’s Smoothie and Duet, both have their excellent configurability. You can make smoothie perform custom operations with a few config lines, and you don’t have to compile anything, ever.
Also, there *is* such a thing as an official RAMPS :) Look up ultimachine. They designed the thing, and sell the best quality one. Same thing for rambo and the same company …
The core chip is just one expense, there’s a lot of other things going on. The ATMega-based designs are beyond mature, all development and other initial costs long paid off. The cheap ones do tend to cut a lot of corners, a lot of the other parts are legacy, and the boards are simpler too. Don’t forget that the motor ICs are rated for 3A, considerably better than you’ll find on a typical budget ATMega based board.
Other than the 3A stepper drivers (which just aren’t needed for 3D printers) the processor is the only thing that this board has to recommend it over the ATMEGA based solutions. I’d love to see a mid range STM32 based board, but they all remain on the pricey side.
Need I point out that the rest of the STM32 discovery range is priced very competitively vs Arduino boards?
ditto for Nucleo boards and they have Arduino connectors if needed. A NUCLEO-F411RE is ~half the price of an arduino and has 16 x flash, 64 x RAM, ~6x clock speed and a proper debugger
Hahaha, you are funny. Compare a design pushed to the limits of cheapness with a state of the art eval board designed to showcase ST’s product line and expect the same price?
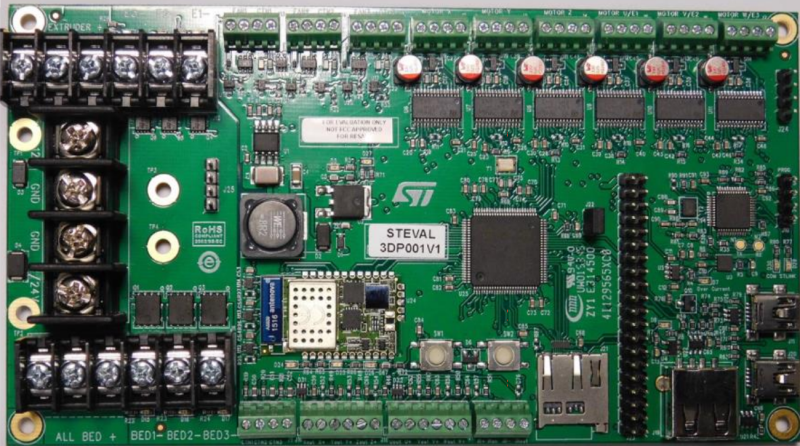
STEVAL-3DP001V1 is not an optimized production board, it’s a freaking eval board for hardware designers to have a baseline to design theyr own boards or for the firmware-engineers to have an early target to start playing around with the toolchain and code before the first in house prototypes start to materialize!
It’s still light years ahead of all the ATMEGA based controller boards tho. But, if you really are happy with your Atmel board, nobody is stopping you to buy and use them…
As far as I know there are two 32-bit boards in the $50 range: AZSMZ Mini and Generation 7 Electronics.
All other boards aren’t more expensive because they try to get the designer/manufacturer rich, but because they try to be rich of features. 5th stepper, 6th stepper; 3, 4 heaters; as many temp sensors; digital motor current control; Ethernet; all such stuff costs much more money than the MCU its self.
Whether such feature-richness makes sense obviously depends on your taste. A commodity printer hooked up to a laptop or to a RasPi needs 4 steppers, two heaters, two temp sensors.
Not meaning to hijack this thread, but I’m in the process of upgrading my old 3D printer (still running Ramps 1.4) and am wondering what the current best (and best supported) board is? Smothieboard’s been mentioned a few times – any other votes?
Thanks,
I just paid for one of the as yet unreleased DuetWiFi boards, another of the 32 bit processor boards. They do have a wired ethernet version, but I wanted the new stepper controllers on the one releasing next month.
As to “best”, that’s likely a hot subject like many in the community. My only vote is NOT a MKS Mini board.
Those are most of an Arduino RAMPS configuration, with pieces left out, and whole features missing or poorly documented.
I personally like the Duet .8.5 (The Aformentioned ethernet capable Duet), of the “Released” hardware best. The Duet WIFI is a major improvement in many areas (Yay for web control, de-mountable SD support just like old RAMPS/Rambo, PT100 and thermocouple support as more than just an afterthought, Delta auto-leveling, and a whole host of other features), but as I bought mine recently, and don’t like Wifi on potentially dangerous equipment (Having had an idiot press a button on a control and cause a spindle to drop through my finger when he could actually see me working with things, and me having my hand on said MCU, does not fill me with confidence about little Johnny knowing enough not to tell it to print while it has parts on the bed already, or someone is working on something inside the chamber), I’m not planning an upgrade currently.
The Smoothieboard V1 is OK, but is behind the Duet Wifi and Replicape processor-wise, and the anything less than the V2 pro won’t have better drivers than the Duet Wifi (Although it apparently will have some really potent drivers if they get cooling right. 3.5A @ up to 60V is what the drivers are rated for, although I doubt the rest of the board will handle it), and it doesn’t yet exist, and there’s not a lot of information as to development on it (While I understand a desire not to have your elbows joggled by novices and demanding users, some more info would be nice.)
Of the current generation, I would rank the 32 bit boards as follows (Note that this is from the perspective of a Delta printer user, and someone used to Haas CNC’s, YMMV)
Duet 0.8.5 – Awesome web interface, heavily documented, easy calibration if you have sensors, no matter what sort of printer, can do 6 extruder with the Duex4 expansion board, A few of the Cons though, for balance: Single voltage only, no fusing, uses really tiny screw terminals for hotend heat.
Smoothieboard – Longer established, more variety in the install base providing more pre-built configurations, automatic leveling and calibration (Not as nice as DC42’s for Delta’s though.). Documentation could be better (TODO’s are common), but has more variety of boards to suit your needs without needing to go all the way to 6 extruder capable, or getting expansion boards.
Replicape – The most impressive processor currently, but with a less than stellar firmware package, and all the complexity inherent in running it on linux, must be a stacked pair of boards to start with, and current generation boards don’t support the expansion board that currently exists.
For the next generation, if you like bleeding edge and are willing to wait, I see it like so:
Smoothieboard V2 Pro
Duet Wifi
Smoothieboard V2
Replicape
This is based soley on what there is to see spec wise currently, and is from the perspective of maximal performance. It may be that the user-friendliness of the duet WiFi does what you want, or the Wifi on a printer is a no-go for you. Not to mention that the firmware for these is also the major determiner of their functionality long term, and that the Smoothieboard V2 firmware isn’t out yet, while both the Replicape and Duet Wifi’s are.
You should go for MKS Sbase v1.3, which is a smoothieware compatible board. It is way cheaper and some even say it is better made than original smoothieboard. The only downside is that the support from the manufacturer is lacking but the support from original smoothieboard isn’t far superior either. so it is your pick. I has been using one for months, it is great, no complain so far.
Oh god how can you say something like ” support from the manufacturer is lacking but the support from original smoothieboard isn’t far superior either” ? This morning I woke up, and spent 3 hours answering emails of folks needing help with Smoothie-related things ( I also do that on IRC and forums etc ). Several of those were for products I don’t sell ( I’m one of the Smoothieboard manufacturers btw ), but I help anyway. Two of those were people who tried getting help from MKS but never got any kind of useful answer. We have a reputation as *legendary* support providers. We also write the documentation ( smoothieware.org ), which is the best of *any* system around, we work of firmware development, we send free shit to contributors, we help contributors add things, and we work on the v2 hardware development, which costs a lot of time and money.
I have no idea where you heard this, but it couldn’t be further from the reality of things.
Also, MKS is a cancer that is sucking the blood off the project, slowly killing it. It’s a closed-source derivative of open-source work. The hundred of volunteers who participated in smoothie all wish MKS didn’t shit on their work. Anything you like about Smoothie, you are helping destroy by getting an MKS board.
I’m with Arthur here. Ever think about how people bring prices down with clones/compatible hardware? They can immediately drop development costs. That’s how a similarly high quality clone can be so much cheaper. It takes money to prototype, to be able to support taking a week and spending it on firmware, to develop new features. It takes an immense amount of time and money to chase down and eliminate bugs, build a community, write good docs, and actually make it so that the whole project isn’t stillborn. After all, what have you heard about the tBone controller recently?
MKS doesn’t care about Smoothie, or about the community, documentation, or support. Those are things they can leave to Arthur, and the other genuine Smoothie developers, supporters, and users, so they can give you a product at a slightly better price. They want their cash, and don’t care what it does to the community. And unlike Takerbot, Smoothie hasn’t closed it’s source. You don’t hear bad things about Azteeg, who also makes smoothie compatible boards, because they haven’t closed source. They give back. Sure, you can save some money. But you save that money at the expense of the community, and at the expense of future development. Penny wise, Pound foolish I say.
While I think the Smoothieboard is great as far as functionality, what is with the layout? The connectors are falling off the edges, and it makes the Raspi’s broken non-sensical layout look like a dream. If you are going to charge upwards of $150 for a PCB, at least make it have the build quality of a $150 dollar board. While I dont like the fact that the Chinese rip off everything known to man, the MKS board has much better build quality from the looks of it than the Smoothieboard. At least the connectors are not falling off the edges of it…
What do you mean “falling off the edges” ? Smoothieboard has all the main connectors on the edges, that was one of the primary design specs for the board initially ( it does make it easier to “play” with the board if you have easier access to it ). This is something a lot of folks appreciate, and it’s the first time in years that I hear a complaint about this. What’s the downside here ? What don’t you like ?
Just did a few checks to see what would have to be changed to make STs evalboard run fully on a 24V rail for motors and all heaters. Most of the simple problems come from capacitors not having the right voltage rating, but from what i’ve seen you could easily replace these parts, even the 33uF/25V AlCaps around the drivers are easy to replace as there are even larger (47uF / 35V) caps in the same footprint size available. Of course there are a few resistors to change too, but nothing major or complicated.
A little bit more critical are the Power-FETs, as they are only rated for 30V. I would definately add some overvoltage protection to them, to make shure a backfire from inductive loads (heaters usually are inductive) can not kill the FET. Replace the power FETs is not impossible, but you need to have the right tools and know-how to de- and resolder them. I would like them to have at least a 40V to 60V rating to be on the safe side.
The real elephant in the room is the 12V-5V DC-DC converter realized with an ST1S40 circuit. This one has an absolute max rating of 18V on the input. I haven’t found a direct replacement for this IC that would work with 24V yet. You could however just remove the chip from the board and use a small POL 24V-5V DC-DC-converter-module (recom/traco/murata/…), glue that on the board and wire it into the circuit.
So, it seems very much possible for someone with a bit of SMD rework experience to upgrade the board for 24V operation. It’s just sad ST has not seen the potential to make it completely 12V and 24V compatible.
Thanks for taking a look at the schematics and docs.
I can replace surface mount devices easily enough. If they included better firmware than Marlin then I might consider it, but I’ll wait it out.
When you have a switch mode (regulated) PSU I would not see problems in 30V FETs. You could although check, if they have an avalanche rating. Heaters are inductive, yes, but way less than a magnet coil. Of course you can connect a freewheeling diode in parallel with the heater, just to be completely safe. Even with 25V AlCaps you do not really need to replace them, they will not fail catastrophically – but it is possible that their life is shortened. Of course than you would have to replace them.
Don’t forget voltage derating with capacitors. I always derate at least 10%, extremists ask for a minimum of 50% derating (space/military). Considering that your 24V supply probably has a +/-10% rating too, you see that keeping these 25V caps, especially if they are heated nicely by the motor drivers right next to them, is proably not the best move forward.
Fun-fact: I actually tried to order one today (there were 4 left in stock at STM direct, “whoot”, I thought). This is what I just received: “Unfortunately the item(s) on your purchase order have export restrictions imposed by the US Government. We are unable to ship these items to you and your order has been cancelled. We apologize for any inconvenience this may have caused.”
Shipito FTW
Just hit that export restriction wall too… Funny to put an US export restriction onto a board, when ST even states on its website that the country of origin is Italy. So, why can i not order it directly from the EU or even from Switzerland (home sweet home) where the ST-HQ is located?
Fun-fact 2: Apparently, shipito also denies to shipito me -_- must be dangerous stuff
[Brian Benchoff], thanks for mentioning the controller I maintain, but it’s not “Gen5”, but “Gen7” or, more extended, “Generation 7 Electronics”.
Simply wish to say your article is as astounding.
The clarity to your put up is simply excellent
and that i could think you’re an expert on this subject.
Well along with your permission allow me to grasp your feed to stay up to date with drawing close post.
Thank you one million and please carry on the gratifying work.
Interesting article, but just don’t see how it started about the new 3D printer controller and extended to CPUs and memory addressing of an ARM CPU.
Anyways, I have downloaded the firmware for Marlin4ST and I’ve been studying it in order to understand the implementation. I just don’t understand why most of these implementations out there are based on the same rule of thumb utilized in the smoothieware, GRBL, or whatever, for motion control.
At least for this new board, the L6474 has a motion engine that can handle positioning, speed, acceleration, deceleration, and everything needed to create a customized motion profile, however, the Marlin4ST’s firmware still ignores all of that by utilizing the planner and several other modules from the smoothieware/GRBL for motion and motor control.
Is there any reason behind that approach? Why not doing it all based on the motion engine the L6474 incorporates while freeing a lot of CPU resources for other tasks like file system, GUI, networking, etc? And is there any reason for picking up the current mode driver instead of the voltage mode one?
Perhaps I would get the answers if I spent more time reading the firmware, but it would save me a lot of time if someone has the answer!
Arthur from Smoothie here.
Pretty much you are underestimating how much work and effort goes into doing the planning and acceleration and junction deviation, how many special cases, how much logic, etc, is involved.
These “smart” drivers are fine if you are moving only one motor, but it starts becoming very complicated if you have to sync them. They have the feature but it doesn’t do all you want. On top of that, it presumes simpler profiles than something like smoothie/grbl will generate, and might ( last time I looked years ago ) chocke on how dense the diagrams are when doing complex tasks.
Pretty much if you look at what they are capable of compared to what grbl/smoothie does in terms of complexity of the planning/execution, there are huge differences. You’d have to look and understand a lot of code to figure out what they are though, but it’s a very interesting subject.