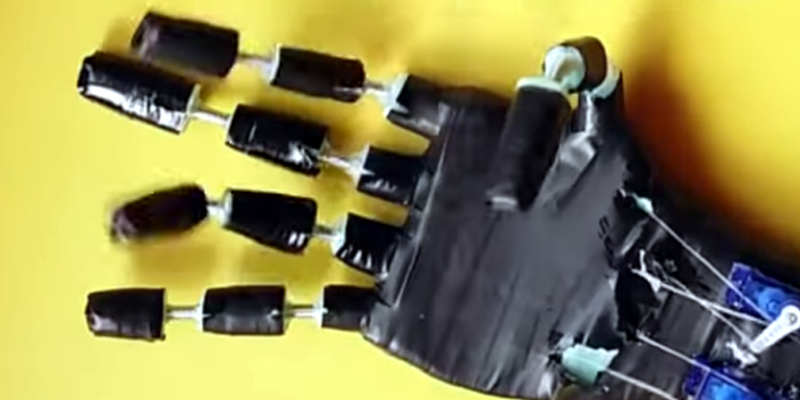
We can’t decide if [MertArduino’s] robotic hand project is more art or demonstration project. The construction using springs, fishing line, and servo motors isn’t going to give you a practical hand that could grip or manipulate anything significant. However, the project shows off a lot of interesting construction techniques and is a fun demonstration for using nRF24L01 wireless in a project. You can see a video of the contraption, below.
A glove uses homemade flex sensors to send wireless commands to the hand. Another Arduino drives an array of servo motors that make the fingers flex. You don’t get fine control, nor any real grip strength, but the hand more or less will duplicate your movements. We noticed one finger seemed poorly controlled, but we suspect that was one of the homemade flex sensors going rouge.
The flex sensors are ingenious, but probably not very reliable. They consist of a short flexible tube, an LED and a light-dependent resistor. We’re guessing a lot of factors could change the amount of light that goes around a bent tube, and that may be what’s wrong with the one finger in the video.
We’d love to try this project using some conductive bag flex sensors. Although this hand doesn’t look like a gripper, we wondered if it could be used for sign language projects.













That is a great tutorial, the sort of thing my kids can see themselves being able to realistically achieve with the sorts of tools, parts and materials they can work with confidently.
This one is a winner.
Appreciate your attitude of growing a feeding the kids. When yours succeed with this, suggest you hand them a diagram of all the tendons in a hand, (and a big handful of springs, servos, tape… or a budget $$ (age dependent)).
Only investment worth making is one in the kids.
(HAD could put aside some space for Parent/Child works. Anybody hacking either already has kids, or and ex and kids, …. and could use ideas…). Geek parents need help! …. ask me how I know….
I’ve done 3 “Kids and Hacking” posts you might like: https://hackaday.com/?s=kids+and+hacking
That is an idea, their mother has a medical doctorate, so perhaps she should teach them that side of things, we’ve got all the anatomy books required. I mean I like the idea of doing multiple projects that lead up to the final one, unless they then get on a 3D printer and take it to the next level. That is why it is such a good basic tutorial, it is a stepping stone to more advanced projects. The radio link has multiple applications too, basically anything of the sensor/data-link/actuator pattern.
I remember seeing that ‘LED and light sensor in a tube’ flex sensor in a book about building your own VR gear years ago.
I wonder if I still have that book somewhere…
Self promotion :) http://www.roboteernat.co.uk/animatronics/robot-hand/
Can we tell me an online shop to buy this progect?