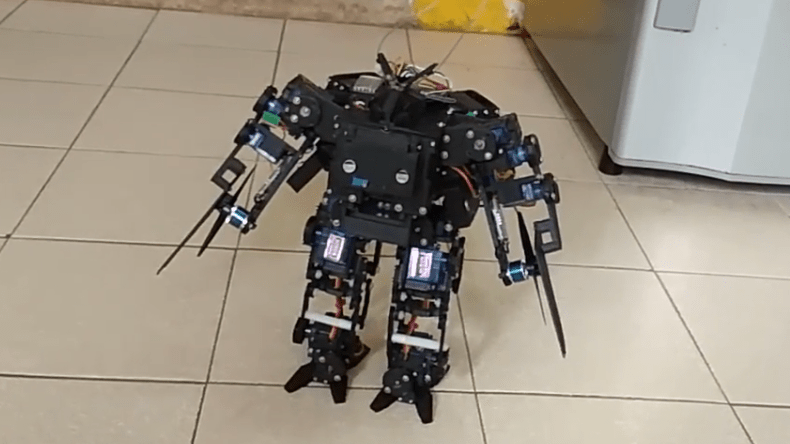
[Project Malaikat] is a 3D printed hybrid bipedal walker and quadcopter robot, but there’s much more to it than just sticking some props and a flight controller to a biped and calling it a day. Not only is it a custom design capable of a careful but deliberate two-legged gait, but the props are tucked away and deployed on command via some impressive-looking linkages that allow it to transform from walking mode to flying mode.
Creator [tang woonthai] has the 3D models available for download (.rar file) and the video descriptions on YouTube contain a bill of materials, but beyond that there doesn’t seem to be much other information available about [Malaikat]. The creator does urge care to be taken should anyone use the design, because while the robot may be small, it does essentially have spinning blades for hands.
Embedded below are videos that show off the robot’s moves, as well as a short flight test demonstrating that while control was somewhat lacking during the test, the robot is definitely more than capable of actual flight.
This video has the best resolution and demonstrates walking.
Here’s a video showing more walking, and the flight hardware (deploying rotors starts at 1:40 in the video below).
Finally, a brief flight test showing that the robot is more than capable of liftoff:
The low-level flight work is being done by a CC3D ATOM flight controller, which takes care of managing thrust to maintain stability. Multirotor flight controllers are incredible pieces of technology in their own right, demonstrated well by making an RC paper airplane using the guts of a cheap toy quadcopter as an awesome afternoon project.
Thanks for the tip, [Baldpower]!














Better not let Skynet get ahold of this one. We don’t need Decepticons invading Earth.
This is legendary! I wowed to many times watching the video haha
Only respect for the whole team!
They should have named it: “Edward Propeller Hands”. Excellent design skills and this is an incredible creation.
Spinning blades for hands shouldn’t be listed as a warning, it should be listed as a feature! :D
wow ,wonderful !
what a creative and talented team that built this. Impressive.
It might be able to run if only it was using its arms to assist the walking…
im not sure i believe the flight. looks possible. but that thing is heavy. and it flew straight out of frame. could be a wire. maybe if it hovered a little and crash landed i would believe it.
I believe the flight. Modern flight controllers are so good they can fly some really strange things. It does look a bit heavy but that becomes more of a problem in the landing and stability. A high throttle jump like that should be possible. Some of the quads I have seen a quite heavy with lots of payload. As with all quads the issue is really battery weight vs flight time.
Agreed, although I’m not sure of the specs of the rotor bldc motors, but I can’t see this as impossible, and clearly the out of frame footage was showing a real experiment, folks tend to only upload their best results, I’ve been guilty before lol