
Mini indoor drones have become an incredibly popular gift in the last few years since they’re both cool and inexpensive. For a while they’re great fun to fly around, until the inevitable collision with a wall, piece of furniture, or family member. Often not the most structurally sound of products, a slightly damaged quad can easily be confined to a cupboard for the rest of its life. But [Peter Sripol] has an idea for re-using the electronics from a mangled quad by building his own RC controlled paper aeroplane.
[Peter] uses the two rear motors from a mini quadcopter to provide the thrust for the aeroplane. The key is to remove the motors from the frame and mount them at 90 degrees to their original orientation so that they’re now facing forwards. This allows the drone’s gyro to remain facing upwards in its usual orientation, and keep the plane pointing forwards.
The reason this works is down to how drones yaw: because half of the motors spin the opposite direction to the other half, yaw is induced by increasing the speed of all motors spinning in one direction, mismatching the aerodynamic torques and rotating the drone. In the case of the mini quadcopter, each of the two rear motors spin in different directions. Therefore, when the paper plane begins to yaw off-centre, the flight controller increases power to the appropriate motor.
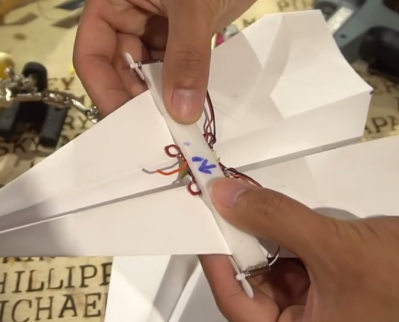
Mounting the flight controller and motors to the paper plane can either be achieved using a 3D-printed mount [Peter] created, or small piece of foam. Shown here is the foam design that mounts the propellers at wing level but the 3D printed version has then under the fuselage and flies a bit better.
Making paper planes too much effort? You could always use the one-stroke paper plane folder, or even the paper plane machine gun.














Ha ha, that’s awesome. Now you can do a real-world version of one of my favorite Mac games: Glider
Unfortunately you’re going to have to go with super glue or something else that Hot Melt will melt those little engines reach a temperature high enough to make it soft and they’ll fall off after less than a minute of flying find out the hard way though this guy is supposed to be better knowledgeable than that
I have one of those little engines, and with the battery they come with and all, I think its safe to say that the glue wont be coming off it.
That is SOOOO BAAAAD!!! ???? Total Grins! Perfect for sending love letters…!
More fun than the Blue Angels!
In olden times, hand launched model airplanes thrown slightly down from horizontal did not stall and quickly began climbing.
what do you mean olden times? People still do that
What a great project and very excellent instructions as well. I love stuff like this that is within the reach of almost anyone. Very well done Sir.
Coming up next: a paper airplane Peter can climb into and fly!
perfect Project for a father son Weekend :D
For what it’s worth;
A4 is metric – 8.27″ X 11.69″
Letter sized – 8.5″ X 11″ (sized he used)
Paper thickness, in this case 20# paper (rather standard copy paper), a ream (500 sheets) of full sized paper 17″ X 22″ weighs 20 pounds. The thicker the paper, the more a ream will weig.