Few things fascinate a simple Hackaday writer as much as a tiny robot. We’ve been watching [Keri]’s utterly beguiling micromouse builds for a while now, but the fifth version of the KERISE series (machine translation) of ‘bots takes the design to new heights.
For context, micromouse is a competition where robots complete to solve mazes of varying pattern but standardized size by driving through them with no guidance or compute offboard of the robot itself. Historically the mazes were 3 meter squares composed of a 16 x 16 grid of cells, each 180mm on a side and 50mm tall, which puts bounds on the size of the robots involved.
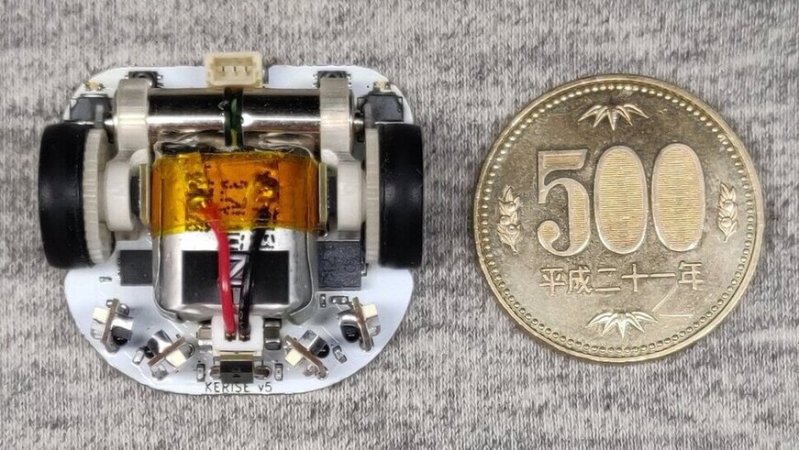
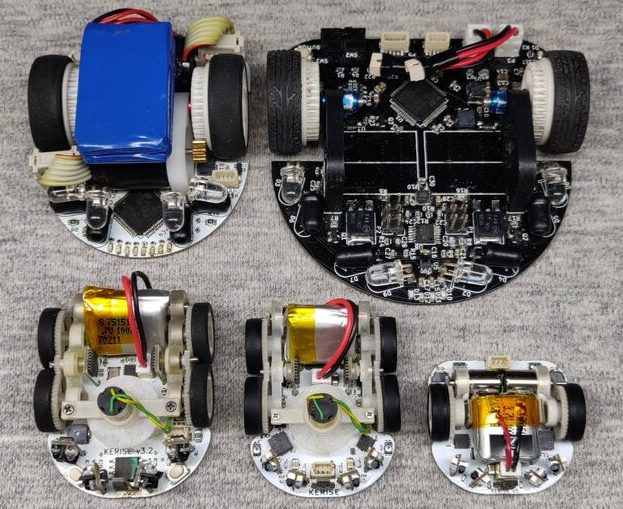
What are the hallmarks of a [Keri] micromouse design? Well this is micromouse, so everything is pretty small. But [Keri]’s attention to detail in forming miniaturized mechanisms and 3D structures out of PCBs really stands out. They’ve been building micromouse robots since 2016, testing new design features with each iteration. Versions three and four had a wild suction fan to improve traction for faster maneuvering, but the KERISE v5 removes this to emphasize light weight and small size. The resulting vehicle is a shocking 30mm x 32mm! We’re following along through a translation to English, but we gather that [Keri] feels that there is still plenty of space on the main PCBA now that the fan is gone.
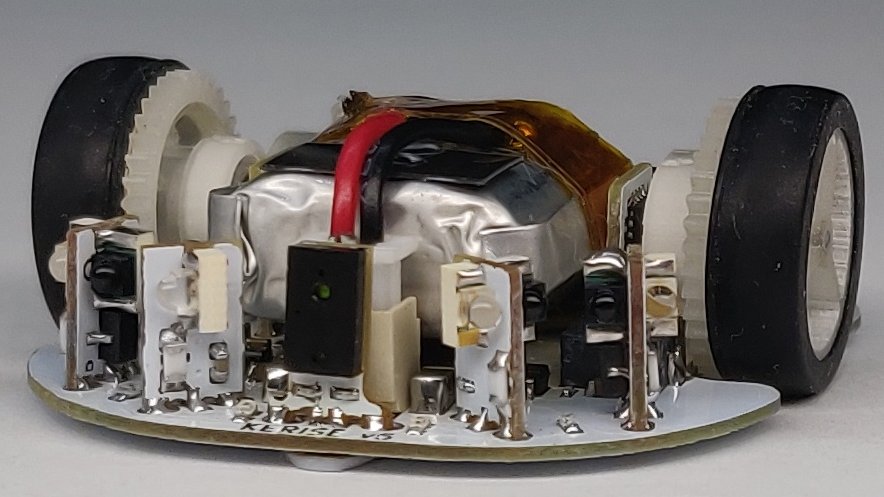
The processor is a now familiar ESP32-PICO-D4, though the wireless radios are unused so far. As far as environmental sensing is concerned the v5 has an impressive compliment given its micro size. For position sensing there are custom magnetic encoders and a 3 DOF IMU. And for sensing the maze there are four side-looking IR emitter/receiver pairs and one forward-looking VL6180X laser rangefinder for measurements out to 100 or 150mm. Most of these sensors are mounted on little PCB ‘blades’ which are double sided (check out how the PCB shields the IR emitter from it’s receiver!) and soldered into slots perpendicular to the PCBA that makes up the main chassis. It goes without saying that the rest of the frame is built up of custom 3D printed parts and gearboxes.
If you’d like to build a KERISE yourself, [Keri] has what looks to be complete mechanical, electrical, and firmware sources for v1, v2, and v3 on their Github. To see the KERISE v5 dance on a spinning sheet of paper, check out the video after the break. You don’t want to miss it!
新作 KERISE v5 で宴会芸できたぞ! pic.twitter.com/vjZunGYJ4w
— けり (@kerikun11) November 22, 2020














That is impressive! Even more so, considering I have that coin on my desk and can directly relate to how small it actually is!
crazy amount of programming to do all that on-board on a microcontroller
In my half-awake state, I clicked on this article thinking that this project was a computer mouse instead of a robot one. Either way it’s a well done project, but it makes a lot more sense this way.
That spinning paper demo is stunning.
I expected a computer mouse with added motion ability, which seems like could be an interesting prank/hack.
(Build a mouse which works normally, but can move itself around too.
Have it move when the user isn’t using it – so you reach for the wrong spot.
Part of a tutorial.
Haunted house effect.
Force feedback?
etc.)
It reminds me this little beast:
http://www.ostan.cz/PocketBot2/
This is really fun, thanks for linking it!