[Levi Janssen] has a secret: he doesn’t like harmonic drives. But rather than abandon the torque-amplifying transmission completely, he decided to see about improving them using 3D-printed compliant mechanisms.
For the uninitiated, harmonic drives, also known as strain-wave gears, are a compact, high-torque gearbox that has become popular with “robotic dog” makers and other roboticists. The idea is to have a rigid, internally-toothed outer ring nested around an externally-toothed, flexible cup. A wave generator rotates within the inside cup, stretching it so that it meshes with the outer ring. The two gears differ by only a couple of teeth, meaning that very high gear ratios can be achieved, which makes them great for the joints of robot legs.
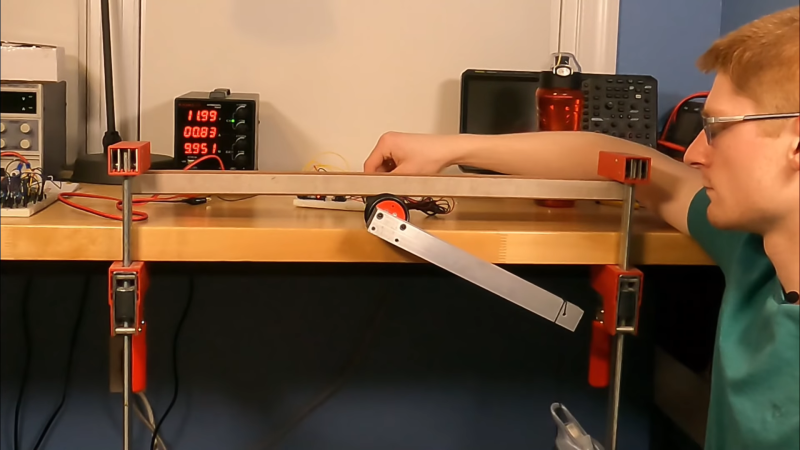
[Levi]’s problem with the harmonic drive is that due to the depth of the flexible spline cup, compactness is not among its virtues. His idea is to couple the flex spline to the output of the drive through a flat spring, one that allows flexion as the wave generator rotates but transmits torque efficiently. The entire prototype is 3D-printed, except for the wave generator bearings and stepper motor, and put to the test.
As the video below shows after the excellent introduction to harmonic drives, the concept works, but it’s not without its limitations. Even lightly loaded, the drive made some unpleasant crunching sounds as the PLA springs gave out. We could easily see that being replaced with, say, a steel spring, either machined or cut on a water-jet machine. That might solve the most obvious problem and make [Levi]’s dream of a compact harmonic drive a reality. Of course, we have seen pretty compact strain-wave gears before.
Thanks to [BaldPower] for the tip.














There is another design (used in metal by Harmonic Drive LLC) that bypasses many of these issues.
See this YouTube video for an example:
https://youtu.be/IdfKre6zpEY
It works pretty well:
https://youtu.be/JSDu81jjYFs
This video shows the actual design of that: https://www.youtube.com/watch?v=nhHDrK6sCRs
In fact, it’s the same kind of design as the “pretty compact strain-wave gears” linked above, just with different materials.
This is great! thanks for sharing.
Andy btw is the one who pointed me in the direction of this style harmonic drive. I was running into similar issues with the cup design. (size and cup breakage) (I am samcoinc)
I kind of agree with him – that concept looks pretty ‘messy’.
(This is a term I apply to things like running digital devices off of batteries, which for some reason I don’t like, and mechanical designs that use flexible parts.)
The world must look pretty ‘messy’ through your eyes!
Science and engineering are how we come to ordered manners of understanding and function in an insanely messy existence. How a foundation works? Very messy, yet we have skyscrapers. How transistors work? Very messy, yet we have 3nm processes. Alloying metals? Very messy, yet we have inconel.
Interesting, the term I apply to things like running digital devices off of batteries is “battery powered” or in certain circumstances “portable” both which for some reason I like very much. But I suppose each to their own.
That “tube” to make the gear flexible does not have to add much to the overall size.
For example, you can design the thing in such a way that the motor fits inside the tube, and the bearings fit around the tube. It would increase the diameter a bit so it’s a tradeoff.
The design as shown in this video also has it’s issues. Everything is stacked longitudal. First the motor, then the flexible part of the transmission and then the bearing. But I do admit that the design looks more promising and usable then I thought at first.
If you want to go really compact, then you have to integrate the whole thing, and that is why “frameless” motors are becoming more popular in robotics. If you buy a “frameless” motor, you get two parts. A rotor, and a stator. No bearings, no housing. You have to design those yourself into your product.
The world does look really messy to me, actually. I’m weird like that :)
A bug not a feature. So no HP calculator, no iPhone, no laptop, no portable radio? Or just being contrary? One senses a hipster “doing it ironically” vibe here.
Aren’t all strain wave drives compliant mechanisms by their very nature?
This sort of thing can help connect printed parts to a motor shaft:
https://www.pololu.com/product/1083
Not cheap ($4) from Pololu, but convenient.
If anyone knows of other suppliers I’d be interested.
I have seen (probably here) folk using one half of a Lovejoy coupling to connect 3DP parts to motor shafts.
Probably more expensive than your link, but available in bigger sizes.