
They might not be the hoverboards we were promised in Back to the Future II, but the popular electric scooters that have commandeered the name are exciting pieces of tech in their own way. Not because we’re looking to make a fool of ourselves by actually riding one, but because they’re packed full of useful hardware that’s available for dirt cheap thanks to the economies of scale and the second-hand market.
In his latest video, the ever resourceful [MakerMan] turns a pair of hoverboards into a capable remote controlled mobile platform perfect for…well, whatever you want to move around. Its welded steel construction is certainly up for some heavy duty tasks, and while we can’t say we’d ever tow a SUV with it as shown in the video below, it’s nice to know we’d have the option.
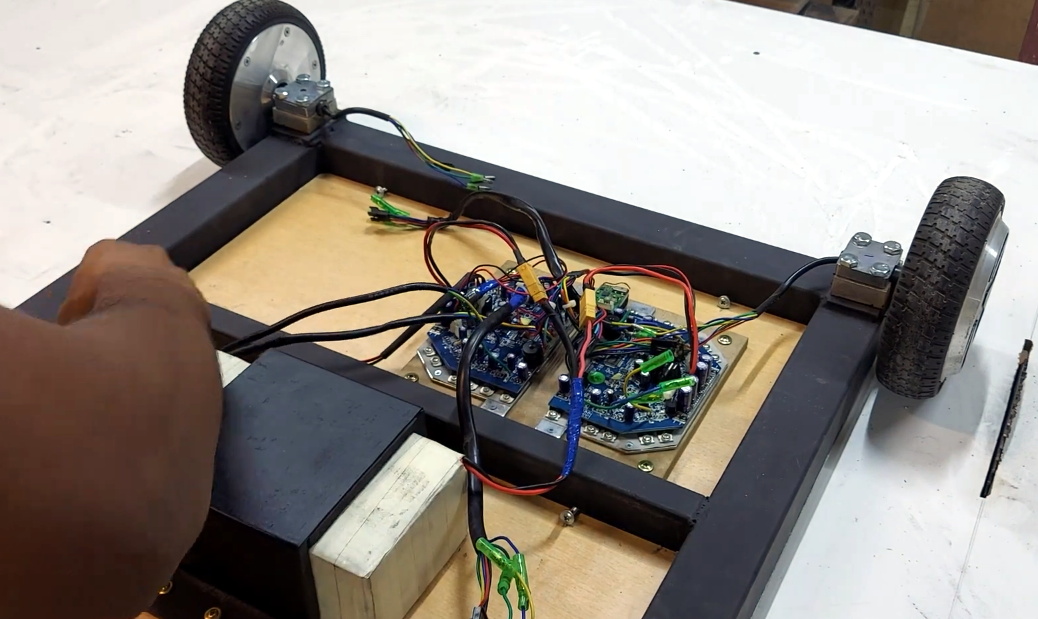 The project starts by liberating the four wheel motors from the scooters and carefully cutting down the frame to preserve the mounting hardware. These mounts are ultimately welded to the frame of the rover, with a piece of diamond plate screwed down on top. On the bottom, [MakerMan] mounts the two control boards and a custom fabricated 36 V battery pack.
The project starts by liberating the four wheel motors from the scooters and carefully cutting down the frame to preserve the mounting hardware. These mounts are ultimately welded to the frame of the rover, with a piece of diamond plate screwed down on top. On the bottom, [MakerMan] mounts the two control boards and a custom fabricated 36 V battery pack.
He doesn’t go into any detail on how he’s interfacing the RC hardware with the motor controllers, but as we’ve seen with past hacks, there’s open source firmware replacements for these boards that allow them to be controlled by external inputs. Presumably something similar is being used here, but we’d be interested to hear otherwise. Of course you could swap the RC hardware out for a microcontroller or Raspberry Pi if you were looking to make some kind of autonomous rover.
Don’t have a welder or convenient collection of scrap steel laying around? No worries. Prolific tinkerer [Aaron Christophel] put something very similar together using bolted aluminum extrusion.














Those wheels are directly connected to the stepper motor shafts *without* additional bearings. Not what I would expect to see on a *heavy duty* rover.
I have seen ghetto very *heavy duty* dolly cart built out of water pipes with ball bearings fitted to them as wheels in my life.
I think those are simply mounting blocks that clamp the shaft down, rather than stepper motors. The motors from hoverboards are typically inside the wheels.
Well, those actually are BLDC hub motors and they have 2 bearings that hold the outer casing to the shaft.
Huh? If you’re talking about those metallic squares, those are the mounts salvaged from the original frame. The wheels themselves are the motors, you just need to keep that shaft from spinning.
Did anyone else notice that Hackaday got some :hover action on the ‘next’ and ‘previous’ links?
Awww! I’ll tell Mike you noticed. :)
similar but enhanced quasi omni-directional trick here.
https://youtu.be/TMiTC9wa5S8
I could imagine a ton of uses for one of these out on the farm!
I guess you’d want larger (at least fatter) wheels on a farm… or tracks.
How it’s possible he connect 2 wheels to one controller?.
It has 2 controllers and 4 motors…
I’m missing something.
my mistake,problem solved one board control 2 motor.
This convinced me to get a “broken” hoverboard. Those motors haul! RC lawnmower coming eventually
Watch the skid steer! With a vehicle that’s about as wide as it is long, you’re going to grind a _lot_ of rubber when you turn. Check out the end of the video — there are rubber circles everywhere, and it looks super sketchy when it’s carrying his weight.
Caster wheels work great, OTOH. Or turn it into an interesting control problem by steering and having the drive wheels match the desired trajectory…
Seems to be more skid than I would expect. Likely control issue of two boards not talking and each trying to keep an upright two wheeler going. Lots of wheel spinning in place if looking. Not feeling any waterproof nature going on for an outdoor machine. I dont know who the car pull demonstration is to impress but ok. Is a good use of stuff.
Mine is heavy duty (100kg+): https://morgan-wild.com/heavy/
^^
that long ass unsupported section of chain is not a good idea
it’s guided by fairly large bobbin idlers, and looks like a very low top speed, so chain slap shouldn’t be too big a factor. it’s when you start getting into harmonic speeds that things get bad
This is EXACTLY what I have wanted to build since the first day I saw those hoverboard things. He did exactly what I had planned but never had the time, money or skill (welding etc) to do! VERY impressed. It’s just as I imagined and does exactly what I thought it would. The only thing I wanted to do extra was stick a Lidar scanner and RasPi on the underside too (i know, blank spots from the wheels) so it could do SLAM. The idea was to use it as an autonomous goods trolley so you could load it, tell it where to go and just walk alongside it while it delivered the load to its destination.
Anyway, well built! I would love to know how long the wheel rubber lasts looking at those marks.
Hi I love this project, well done. Could you please explain how you control the motors without using the tilting of the normal hoverboard. I want to build a 3 wheel mobility scooter using a hand throttle.
Thank you.
Robbo
This is what I was looking for I was thinking about using some Solar Panels + a Camera/Internet/Wifi To auto move a chicken coop every day for a few meters in the grassland on auto pilot…