Actuators that are powerful, accurate, compact, and cheap are like unicorns. They don’t exist. Yet this is what [3DprintedLife] needed for a robotic camera arm, so he developed a custom 3D printed high torque strain wave gearbox to be powered by a cheap NEMA23 stepper motor.
Strain wave gears, otherwise known as harmonic drives, are not an uncommon topic here on Hackaday. The work by deforming a flexible toothed spline with a rotating elliptical part, which engages with the internal teeth of an outer spline. The outer spline has a few more teeth, causing the inner spline to rotate slowly compared to the input, achieving very high gear ratios. Usually, the flexible spline is quite long to allow it to flex at one end while still having a rigid mounting surface at the other end. [3DprintedLife] got around this by creating a separate rigid output spline, which also meshes with the flexible spline.
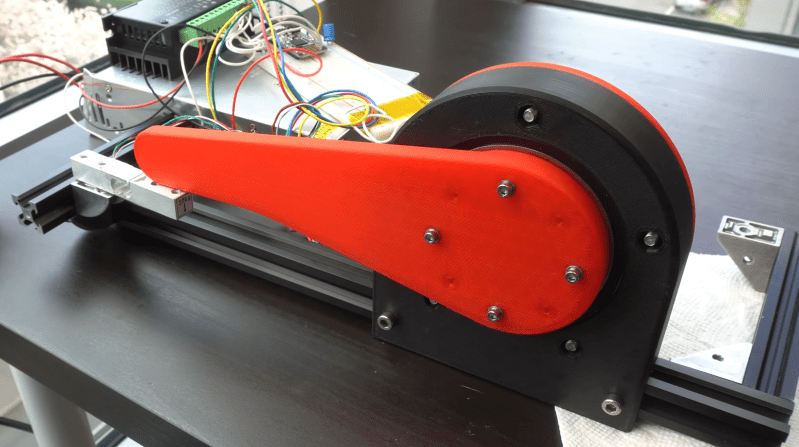
At first, he used a toothed rubber belt for the flexible spline, which proved to be a bit too flexible and introduced unnecessary backlash. It was replaced with a 3D printed flex spline, which also allowed [3DprintedLife] to tune the tooth profile for maximum torque handling and minimum backlash. He also created an automated test rig with a 20 kg load cell, Arduino, and aluminum extrusions. This allowed each design iteration to be tested repetitively with no manual intervention, allowing design weaknesses to be rapidly identified and fixed as parts broke. The final version is capable of repeatedly producing 10 Nm of output torque, and [3DprintedLife] was only able to break it by putting almost his full body weight on the output arm.
All the parts were printed with PLA, but [3DprintedLife] plans to move to Nylon in the future. The robotic arm is still in the design phase, but we look forward to seeing it collect B-roll for future videos.
A camera arm doesn’t need to be motorized to work well. [Ivan Miranda] and [Alexandre Chappel] recently built large camera arms for their workshops, and both made heavy use of 3D printed parts.














Nice build. What printer/plastic are you using?
Did you even both reading or viewing?
[P]re-Depleted [L]-isostatic-uranium [A]cetate
He mentions PLA for all his prints but planning to use nylon in future.
In my experience PET-G is a good option too.
Good luck finding any…