Lockpicking is more of an art than a science: it’s probably 10% knowledge and 90% feeling. Only practice will teach you how much torque to apply to the cylinder, how to sense when you’ve pushed a pin far enough, or what it feels like when a pin springs back. Surely a robot would never be able to replicate such a delicate process, wouldn’t it?
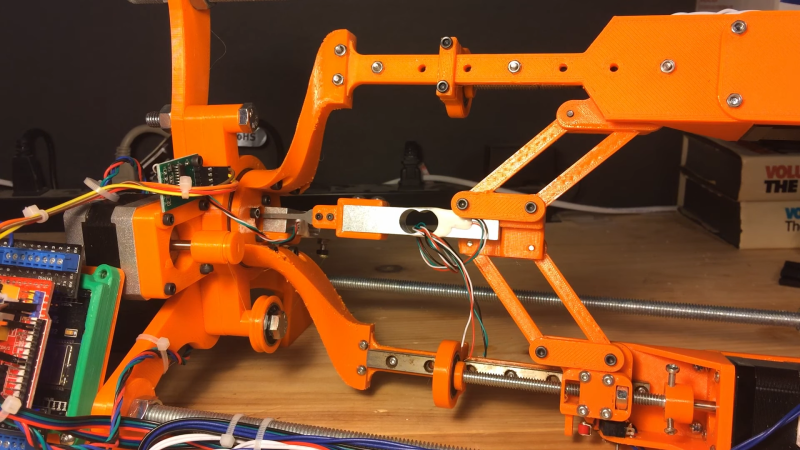
Well, not according to [Lance] over at [Sparks and Code], who thought that building a lock picking robot would be an interesting challenge. He started out with a frame to hold a padlock and a servo motor to apply torque. A load cell measures the amount of force applied. This helps to keep the lock under a constant amount of tension as each pin is picked in succession. Although slow, this method seemed to work when moving the pick manually.
The difficult part was automating the pick movement. [Lance] built a clever system driven by two motors that would keep the pick perfectly straight while moving it horizontally and vertically. This was hard enough to get working correctly, but after adding a few additional clamps to remove wobble in the leadscrew, the robot was able to start picking. A second load cell inside the pick arm would detect the amount of force on each pin and work its way across the lock, pin by pin.
At least, that was the idea: as it turned out, simply dragging the pick across all pins in one go was enough to open the lock. A much simpler design could have achieved that, but no matter: designing a robot for all these intricate motions was a great learning experience anyway. It also gave [Lance] a good platform to start working on a more advanced robot that can pick higher-quality locks in which the dragging technique doesn’t work.
We haven’t come across lockpicking robots before; perhaps the closest equivalent would be this 3D-printed Snap Gun. If you’re interested in all aspects of locks and how to apply them, check out our Physical Security Hack Chat with Deviant Ollam.














Looks like a Master lock. If it’s one thing Ive learnt watching Bosnian Bill it’s that Master locks are crap.
Setting all of the pins in one motion is called “raking” the lock, and it works for very simple combinations of pin lengths. When picking a lock, I always try to rake it first, because, well, I’m just not any good at keeping track of the status of each pin, i.e., at picking locks. Raking RARELY works, except on really crappy locks with really easy pin combinations. So no, he didn’t waste a lote of time trying to get it to work one pin at a time. Great job anyway; I wouldn’t have even tried to automate the process, since I can’t even do it reliably myself!
I’ve made dozens of lock picking robots. They go “Brrrrrrrrtttttttt”. Sold them for years until the manufacturer changed the design of the base product. Handheld, though.
This is still cool.
Lawsuit from The Lock Picking Lawyer in 3… 2… 1…
B^)
When replicating this, note that during calibration, the test weight needs to pull in a direction perpendicular to the long side of the strain gauge. The parallel component of the force vector has no effect.
Pulling at an arbitrary angle leads to the torque being overestimated.
True this isn’t what we lockssporters would call “picking” but it’s a good start. In my experience tensioning is a huge deal. It takes a while for most people to learn that skill. Most people tension too hard. Every lock requires a different amount of tension. Sometimes you even need to adjust tension as you pick. Once you learn tensioning most locks are a breeze until…….. SECURITY PINS! That is where things start to get tricky.
It could have been amusing to give it an electric toothbrush.
i wanna see this get finished and 1v1 the LPL.