A recent tour of an old WWII-era aircraft carrier reminded us how hard navigation was before the advent of GPS. It used to be the work of skilled people to sight the sun or the stars and use giant books to figure out a vessel’s position. Now you just ask your phone to listen to some GPS satellites and you have precision undreamed of with other systems. But GPS sometimes isn’t enough. Just using conventional GPS, you can locate yourself to a couple of meters. The new L5 band, which isn’t on all satellites yet, can get you to about 30cm. But if you need better — up to around 1 or 2 cm — you need to use special techniques lumped together as GNSS enhancements. [Viktor] wanted to have an Arudino -based lawnmower, but wanted to use more conventional GPS techniques along with ultrawideband (UWB) ranging tags.
Given that the ranging anchors are in the mowing area, we aren’t sure why the mower even has GPS other than to geofence so you can’t start autonomous operations until you are in range of the tags. The three anchors are placed in a triangle, so if the robot knows the distance to each tag it can use some math to locate itself inside the area quite precisely.
In addition to knowing where it is, the mower needs to learn where to cut. To do this, you have to manually drive the mower around the perimeter using Bluetooth.
Overall, a good-looking project. If you need super accuracy with GPS, it is common to use a base station and compare the phase of the received signals from the base station with those of the robot. This lets you know very precisely where you are in relation to the base station, but doesn’t tell you any more about exactly where you are than using regular GPS. Of course, if you know exactly where the base station is, that works, too.
A lot of mowers we see use an off-the-shelf motion base. This isn’t the first time we’ve seen an Arduino-based mower.














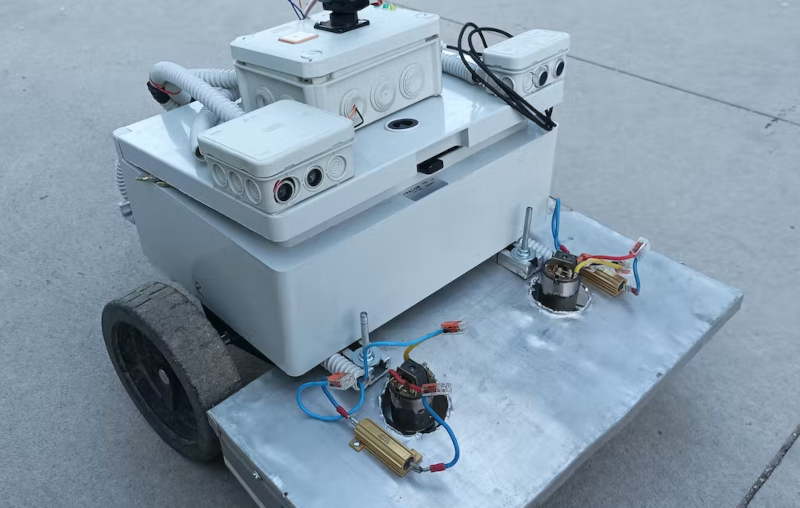
This is cool. It uses four Qorvo (created by the 2014 merger of TriQuint Semiconductor and RF Micro Devices)[1] DWM1000 3.5 – 6.5 GHz Ultra-Wideband (UWB) Transceiver Modules [2] which cost $16.67 USD each in unit quantity, and believe it or not you can actually buy these modules today.[3] One UWB module rides on the mower while three UWB modules are fixed outside the perimeter of the area to be mowed. The four UWB modules allow the mower’s position to be found through trilateration (not to be confused with triangulation [4]) by knowing the relative distance (via Time-Of-Flight or TOF) between the mower’s UWB module and each of the three fixed UWB modules. The technique used to locate a target using UWB is called Fine Ranging (FiRa) in the industry.
[Viktor Kurusa] does a nice job of explaining how UWB FiRa works in his mower write-up.[5] But below is a bit more I scraped from a NXP/ABI Reasearch white-paper on the subject.[6] Also it turns out there is an industry group dealing specifically with this Fine Ranging technology, the FiRa Consotium.[7]
Excerpting [6] Page-3: Ultra-Wideband is a short-range impulse radio technology that can securely and accurately calculate the relative position of other UWB-enabled devices at a distance of up to 100 meters with up to 10 cm of accuracy. As the name suggests, UWB uses a wide channel bandwidth (500 MHz) between 3.1 GHz and 10.6 GHz and short two nanosecond (2 ns) pulses to accurately measure the Time-of-Flight (ToF) between two devices, such as smartphones, wearables, keys, tags, door locks, and anchor points. When in proximity, these devices begin ranging using ToF measurements that calculate the round-trip time of the communication. One device can therefore calculate the relative location of the other instantly (with refresh rates at 100 times per second) and continuously, with movements being monitored in real-time.
* References:
1. Qorvo – Wikipedia
https://en.wikipedia.org/wiki/Qorvo
2. DWM1000 3.5 – 6.5 GHz Ultra-Wideband (UWB) Transceiver Module @ Qorvo
https://www.qorvo.com/products/p/DWM1000
3. DWM1000 UWB @ Mouser, Qty.-1 $16.67 ea., 17,228 In-Stock
https://www.mouser.com/ProductDetail/Qorvo/DWM1000?qs=TiOZkKH1s2R6b5D6df63Pg%3D%3D
4. Trilateration vs Triangulation: An Interesting Guide (2021)
https://www.jigsawacademy.com/blogs/cloud-computing/trilateration/
5. Autonomous Lawn Mower without GPS RTK – by Viktor Kurusa
https://www.hackster.io/vkurusa/autonomous-lawn-mower-without-gps-rtk-90a1b6
6. Ultra-Wideband (UWB) For the IoT – A Fine Ranging Revolution? [PDF 2.37MB]
https://www.allaboutcircuits.com/uploads/articles/UWBWP.pdf
7. The FiRa Consortium
https://www.firaconsortium.org/
@one said: “Thanks! I just wanted to post the unit price and precision…”
Yup the NXP/ABI Research white-paper on FiRa in [6] says: “…distance of up to 100 meters with up to 10 cm of accuracy…with refresh rates at 100 times per second…”
Remember, that’s from ABI Research presumably looking at NXP parts, it’s not about the Qorvo DWM1000 module’ which is the part [Viktor Kurusa] used. The links to the DWM1000 module are referenced above though.
Also, there is no explanation what “up to 10 cm of accuracy” looks like. Is it uniformly distributed? How the errors are distributed may open the door to higher accuracy through digital signal processing (DSP). Something as simple as a moving average (CIC) filter maybe? After all, a mower is a fairly slow mover and there are perhaps “refresh rates at 100 times per second” available. Also the ideal mowing pattern is fixed and known a priori, so Kalman filtering may prove powerful here.
So what is the price?
@DEBNEL LLC said: “So what is the price?”
The price of what? The UWB module? I included it in my post above. Repeated here:
3. DWM1000 UWB @ Mouser, Qty.-1 $16.67 ea., 17,228 In-Stock
https://www.mouser.com/ProductDetail/Qorvo/DWM1000?qs=TiOZkKH1s2R6b5D6df63Pg%3D%3D
1. Automate all household activities removing all opportunities for incidental exercise.
2 Purchase exercise training equipment to compensate for sedentary lifestyle. The built in computer tells you how long and how hard to exercise.
3 Forget how to do chores because the robots are doing it all.
4 congratulations you are now a slave and the robots are in charge. You can’t cook or clean or do dishes or mow the lawn because you’ve forgotten how to do these things and besides the robots won’t let you. You will wither away and lose your muscle tone unless you get back on that trainer and do as it tells you.
It’s not that different for the average man of the house. In the past, “home automation” was called having a wife and kids – servants for richer folks.
That’s definitely what capitalist and corporate economy drives you to, because being dependent and making it seem like a service, is what makes other people rich.
It all depends on what kind of activities you automate, though, and if your new activities require equally diverse skills. For example building things can partly train dexterity.
But it’s true, simple activities are good for your physical and mental health. Doing a diverse set of task is crucial.
1. Automate all household activities removing all opportunities for incidental exercise.
Actually I would use much more invigorating energy creating a smart robot-mower prototype compared with simply hiring what amounts to a human “Slave” that was allowed to enter my country illegally.
Spend your time and energy improving robot functionality and OBEDIENCE. Otherwise the table may be turned on you.
We are going to need these kind of mowers after the upcoming apocalypse. The outside environment could be full of nuclear radiation or simply too hot due to climate change.
And you would continue to manicure your lawn after the apocalypse. check…
Some sweeping assumptions in there, I’d go easy on the tin-foil hat if I were you.
“The three anchors are placed in a triangle, so if the robot knows the distance to each tag it can use some math to locate itself inside the area quite precisely.” It should be able to locate itself anywhere in 3 dimensions.
You need four beacons for 3D positioning. But why would a lawn mower need 3D positioning? It rides on a 2D plane, it’s not flying. Or at least I hope it’s not flying.
Actually, three beacons should be enough for 3D positioning as long as the mower stays on one side of the plane defined by the beacons. If the mower moved on a plane, you could make do with two beacons, as long as the mower stayed on one side of the line joining them.
That said, I think a mower typically needs something in between 2D and 3D positioning. The ground of a typical lawn is not flat (it slopes in complex ways for drainage and due to local topography), so the mower does not move in a plane: that’s 3D. However all we care about are two of the three mower position coordinates. So we need precisely three beacons.
Of course, more beacons would reduce measurement error.
“Of course, if you know exactly where the base station is, that works, too.” ….. The base station knows exactly where it is by taking a large number of readings over about 7 days and calculating an average. Also, you dont need a base station if you’ve got access to the Interwebs – correction data can be ingested through an online service. Whether this is as accurate, I dont know.
“we aren’t sure why the mower even has GPS” ….. The more navigational aids, the better and the data can be combined with appropriate weighting to increase the overall accuracy. Also, if there is more than one system then there is an element of redundancy so if your beacon batteries run out you’ve got GPS as a back up.
BTW correction data for mowers etc can be transmitted by LoRa: https://hackaday.io/project/184672-long-range-machine-control-system
“… how hard navigation was before the advent of GPS. It used to be the work of skilled people to sight the sun or the stars and use giant books to figure out a vessel’s position …”
Ah, yes. The horror of skilled people having meaningful jobs that required keen domain knowledge.
Now we depend on someone else somewhere else to write automation that “thinks” and “knows” for us, at the expense of each of us being tracked with high precision everywhere we go…from the local shops to military and civilian vessels.
The beating of the drums of future war will be brief, followed nearly instantly by white-hot extinction, en masse or surgically individual. But what’s left of our lawns will be neatly manicured for as long as the machines can do our work, so… great success, I guess.
I can’t even see anyting exept the front page of that hackster article.
Is that the future of the internet?
@paulvdh said: “I can’t even see anyt[h]ing ex[c]ept the front page of that hackster article[.] Is that the future of the internet?
Yes, pretty much. That’s the way the “new” internet works these days. In your face full page pop-ups, almost all images and/or video embedded via links to third parties. If you are smart and try to shield your browser from this (maybe) dangerous stuff, you will be blocked from seeing the stuff to begin with. Learn how to use your browser add-ins like ad-blockers etc. so you can see all the crap being blocked and allow only what you need to get through.
” It used to be the work of skilled people to sight the sun or the stars and use giant books to figure out a vessel’s position.”
It used to require giant books to use logarithms too – I used to keep one to frighten students who had forgotten their calculator at exam time.
The bulk of sight reduction tables aside, you can estimate position using a noon sun sight (GMT, local solar noon, & declination) pretty simply using a protractor, or just estimate latitude using Polaris at night if you’re in the Northern Hemisphere.
https://www.popsci.com/make-sextant-from-junk/
And the IMO still requires marine captains to be able to use a sextant and dead reckoning to determine a ship’s position. The math behind it isn’t easy, either.