Drones are pretty common in the electoronics landscape today, and are more than just a fun hobby. They’ve enabled a wide array of realtors, YouTubers, surveyors, emergency responders, and other professionals to have an extremely powerful tool at their disposal. One downside to these tools is that the power consumption tends to be quite high. You can either stick larger batteries on them, or, as [Nicholas] demonstrates, just spin them really fast during flight.
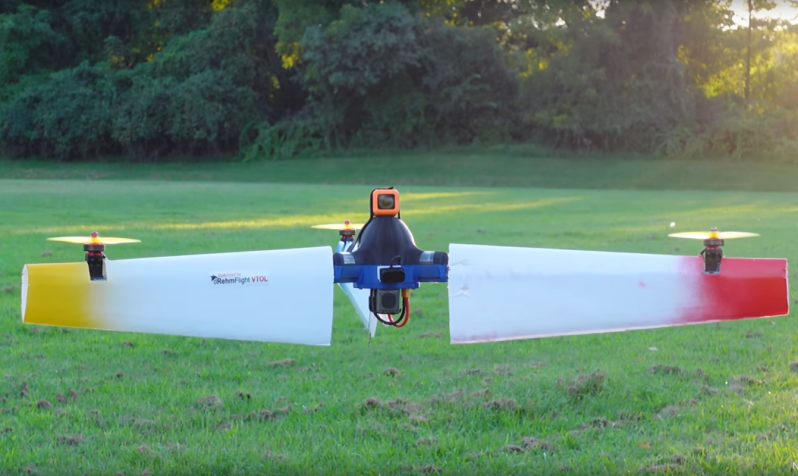
We featured his first tests with this multi-modal drone flight style a while back, but here’s a quick summary: by attaching airfoils to the arms of each of the propellers and then spinning the entire drone, the power requirements for level flight can be dramatically reduced. This time, he’s back to demonstrate another benefit to this unique design, which is its ability to turn on its side and fly in level flight like an airplane. It’s a little bizarre to see it in the video, as it looks somewhat like a stationary propeller meandering around the sky, but the power requirements for this mode of flight are also dramatically reduced thanks to those wings on the arms.
There are a few downsides to this design, namely that the vertical wing only adds drag in level flight, so it’s not as efficient as some bi-wing designs, but it compromises for that loss with much more effective hover capabilities. He also plans to demonstrate the use of a camera during spin-hover mode as well in future builds. It’s an impressive experiment pushing the envelope of what a multi-rotor craft can do, and [Nicholas] still has plans to improve the design, especially when it comes to adding better control when it is in spin-hover mode. We’d expect plenty of other drones to pick up some of these efficiency gains too, except for perhaps this one.














I have zero experience/expertise in this area, but to me, the effort and documentation appear amazing. I will be interested to see how he solves the station-keeping problem during rotational hover. The rotational hover power efficiency was a surprise to me.
it shouldn’t, the larger the disk area is the more efficient the the rotorcraft becomes
I wonder if a 4 bladed prop with the wings in an flat X (for example 60 degrees between the blade pairs, iso evenly spaced at 90 degrees, like the tailrotor on an Apache helicopter) might make it more efficient in forward flight since all bladed would be able to contribute to lift
That’s what I was thinking too, with 4 all the blades should contribute lift. Also for the camera that could be solved in software, it you know the rotation speed of the vehicle/camera, you should be able to calculate when the camera is pointing in a given direction and just stitch together single shots from the direction you want on the fly.
You still have a problem with blurring, especially in low light conditions. There are some deblurring algorithms but I wouldn’t trust them for SAR or recon applications. Maybe an event camera could do but image reconstruction from event stream IMO is in its infancy right now.
There’s a few drones that do this with a “maple leaf” seed style drone. I can’t find the footage, but the spinning results in a lot of frame smear and shake. It’s serviceable, but not pleasant to watch.
*cough* *Coug* Imperial Shuttle *Cough* *cough*
That’s what I thought!
And I wonder if he’d based it on an x-wing instead with more horizontal wings if the level flight efficiency would be even higher?
take a page from battlebot “MeltyBrain” control schemas. a fast-reacting magnetic compass could offer directional validation
couldn’t it have two wings with tip rotors and to smaller protuding arm with fix rotor for regular quad copter flight? to improve fixed wing flight
It could be a tilting/rotor with auxiliary motor in the back for hover pitch authority.
He sounds as if he knows his stuff. But he doesn’t. For example: he says the drag of the vertical surface will be significant cause for the loss in efficiency from hoover while spinning. Well… no! He’s just said that he thinks the wings are stalled at 20 degrees AOA forward flight. A stalled wing has MUCH more drag than a wing pointing “straight up”.
And comparing “level flight power” is not the right way to go. This means that “to stay in the air for the longest amount of time”, you’d need that AOA. But he’s determined that spinning is more efficient to “stay in the air”. When you want to get somewhere, you need the power-draw divided by speed to get energy per meter covered. In “unpowered flying” (Delta, paraglider, sailplane etc) this is “min sink” vs “best glide”.
(In my sample of 1, even professional airline pilots don’t know the difference. Bad situation IMHO!).
20 degree AOA? It’s stalled, even without the 30 degree bank on each wing.
A stalled wing usually has a lift to drag ratio of about 1. So the tip rotors are doing more work*. Needs to fly faster, but is CG in front of CP?
*work definition pendants enjoy the opportunity to be smart.
pendant spelling pedants also.
Xcraft was doing this about a decade ago with their “XPlusOne” drone https://youtu.be/-oGZo6pVwwc?t=201
Would spinning while moving forward eliminate the vertical wing drag? I know the control would be 10x harder, but efficiency…
Parrot swing rc quad came out in 2016/2017 https://the-gadgeteer.com/2017/04/18/parrot-swing-drone-review/