
How do you build a practical tank-driving simulator in the 1970s, when 3D computer-generated graphics are still just a fantasy of the future? If you’re a European tanker school, the solution is to use a large CNC machine to drive a camera around a miniature terrain model (German, translated). In the video after the break, [Tom Scott] takes it for a test drive.
Developed in France, the simulator provided a safer and more cost-effective way for teaching new trainees the basics of driving Centurion, Leopard 2, or Panzer 68 tanks. The trainee sits in a realistic “cockpit” mounted on a hydraulically-operated motion platform, with a TV screen in front of his face, which is connected to a camera mounted on a large gantry-style CNC platform.
The camera’s lens is mounted just above a pivoting metal foot which slides across the 12 m-long terrain model and sends its angle to the hydraulic system. It will even alter the tank’s handling based on its current position on the model to simulate different surfaces like dirt, snow, or asphalt.
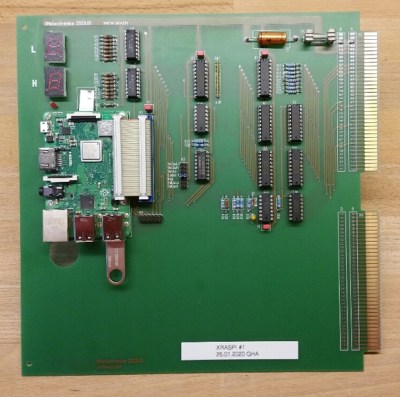
The last of these systems remained in use until 2004 at the military training center in Thun, Switzerland, before being saved by the Swiss Military Museum from being scrapped. The original 70s computer, electronics, and hydraulics finally gave out, so the museum undertook a complete refurbishment of the system to return it to working order for museum visitors. It was kept as original as possible, but parts for the original computer could not be found, so it was replaced with a Raspberry Pi and custom interface board.
Over three decades, these simulators probably trained a few thousand tank drivers, and even with limited technology did an excellent job of preparing trainees for the real thing. Besides providing training for operators, drivers and pilots, simulators are also just plain fun. We’ve seen some impressive home built simulator including a A-10 Warthog, an F-15 sim built from an actual wreckage, and even a starship’s bridge.














Back in the 80s I worked for singer link flight simulation. Some of the flight simulators used model board and camera to operate. A couple of interesting items, one the original used bright lights to illuminate the surface. The power requirements were crazy so they switched to laser illumination. Then they had to design and add a laser range finder to cut off the motion of the camera because it would crash into the model board. The coats for making a section of the model board were crazy. In 86 I was working on the migration to digital imagery. The power per board in a card cage was limited to 1500 watts per board. Card cages could hold up to 10(maybe 12 boards). There were 6-7 boards per cabinet and 5 or 6 cabinets. It was by far and away the most interesting place I worked at.
IOW, the galoots gutted an antique and tossed in a Raspberry Pi!
B^)
Would you rather stare at a broken antique or would you rather experience it fully working, as original, but with not original era parts?
Steve Jurvetson shows one off from his collection, from Apollo 14:
https://www.flickr.com/photos/jurvetson/4255332297
Used for training for landing on the moon.
Similar terrain boards were used for flight simulators before Evans & Sutherland finally yanked everyone into computer-generated images around the early 80s.
A freind of mine was working on computer-genrated simulators back in the ’80’s.
They had some military brass in to look at what they had, and said brass were pretty bored and disinterested with the demo.
Then they put a camouflage coloured tank into the demo – suddenly the brass were whooping, and I think they got a sale!
Ah the one time no one would look askew at adults playing with their toys at work.
John Dykstra’s DykstraFlex evolved from a similar idea. https://youtu.be/4QJr2FvQlqY?t=94
It would be cool to fully 3D scan that model board then put that into a computer simulation of the simulator so people who want to have an experience of vintage analog simulation won’t have to go to Switzerland.
Soo…. A simulation… within a simulation!!
Reminds me of “The 13th Floor” or “World on a Wire”, two great movies..
A tank simulator simulator?! I love it.
I’m not sure you would maintain the “experience of a vintage analog simulator” though.
Panzer Simulator, please! 😁
Apparantly a Dutch company sold these simulators and got the swedish millitary to buy one.
All was well, but after a couple of months the machine “malfunctioned” and bones were broken.
Turns out that the simulator took into account the slope of the terrain. Holland is flat, very flat. Sweden has hills, mountains. So the designers had stored the current speed of the machine in a 16 bit integer with plenty of margin between “max speed of the tank” and overflow of the 16 bit integer. When going downhill at full throttle, the tank could go faster than its max speed (on flat terrain) and hit the overflow. So the tank went from going say 64km/h to -63km/h in a fraction of a second. Welll the mechanical system was able to simulate the resulting jolt with sufficient accuracy to hurt the occupants….
The youtube video is broken for the latest Firefox browser. Couple versions older works fine.
Also Doesn’t work in YT App on iPhone.
Libel. I tried in Chrome portable and youtube-dl and it broken across all browsers. Even Edge.
Yet it works perfectly in Chrome…
The joke is you are trying to argument from higher ground AFTER Google fixed the bug on all platforms already. You are a bit late to the party to make statements about the scale bug when it still occurred. Works fine on firefox.
Does still not work on Firefox on Android (106.0b5) here. :(
‘Oh look someone gutted an antique to shove a raspberry pi in.’
Unlike your average case of ‘hey I am using the old thing as a case for my kodi box’ they had to essentially wire up all the analogue inputs both for the tank controls and camera so that the pi could recognize them, and so the pi can give the proper output for each. As impressive as it is to get the hardware up and running? I wanna see what the software is like.
I was joking.
That would be a fun system to re-create. The new 90° Laowa ‘peri-probe’ lens is almsot tailor-made for that setup so you could run it with 4k video rather than an ancient analog camera. If you were willing to increase the scale to allow for physical separation, you could even mount two of them side by side of scale stereo video! With the stock periprobe (15mm diameter, so 15mm ILD) you’d be looking at around 1:4.2 scale, but if you use the straight probe canted at an angle and fabbed your own mirrors you could probably get the effective ILD closer for a smaller scale. The probe lenses are waterproof too, so you could create a submarine simulator!
I drove one of these in the mid 80s in Tulsa, Oklahoma. The terrain board was probably 5m x 7m, and the sensor looked a lot like a sewing machine foot. They were using it to train on the new M1 Abrams tanks. It was in a non-descript office building in the suburbs that was having an open house, and I convinced my mom to stop in. One of the coolest things I ever saw. It was pretty convincing sitting in the 6-axis simulator looking through the “viewports” of the tank, driving around.
The interesting thing is that today instead of using a model to train with you could simply use a drone sending video back to the simulator. This way you could practice on real terrain without running a tank over it.
You could have done so even back then, I suppose..
A drone, a helicopter or quad-copter, isn’t that new. Just got mainstream ~ten years ago. Especially in Germany, those apparatuses were known early on.:
The whole US flight history would be very poor perhaps without its experimental stuff (stealth aeroplane etc).
But there’s one big problem, with using real terrain.:
Weather. And climate, too.
Using a sports hall or an abandoned film studio might be an alternative.
Then, drones could be used regularly fir training, maybe. 🙂👍
Tim Hunkin’s Mobility Masterclass works a bit like this too > https://www.timhunkin.com/a113_Mobility_Masterclass.htm
I’ve played a “flight simulator” from this era, in an arcade! The terrain is on a belt which moves towards the player depending on “air speed”, you have a “gun sight” that you place your forehead against, and there’s a stick of neon lights protruding out in front, which blink in sequence to simulate “tracer rounds” leaving the gun. As you steer the plane, the belt pitches and banks beneath you, and there’s some accommodation for throttle and stall which I don’t remember exactly.
Hit detection is done with little metal tags on the underside of the belt, which are registered by a feeler probe that mirrors the motion of the plane above. As your rounds shoot down the neon-lights sequencer, when one of them hits the terrain (lights up the last bulb), the circuitry checks to see if the probe is touching a tag (valuable target), and increments your score accordingly.
The arcade attendant said it was one of his favorite machines but also one of the most needy in terms of maintenance. I can see why!
Back int he 80’s ( a recurring theme here), we had terrain board flight simulator at Wright Patterson AFB. It was quite realistic, they could optical in induce fog, and electronically introduce turbulence and wind drift. It was used for developing control systems, and reproducing operational glitches. To keep things interesting staff would occasionally stick a statue of King Kong on the terrain board. I wonder what ever happened to it.
I entered the US Army in 1991 at Fort Knox Kentucky. They hadn’t developed the digital M1 Abrams Drivers Simulator yet. I learned to drive in the M60 Simulator that was like this with a camera that followed terrain and sent instructions to tilt the drivers box. As I was driving a roach was on the terrain model and my instructor kept giving my instructions to chase it and run it over. It was like being in a 50s horror movie with giant bugs.
i trained on this simulator back in 2004 for my leopard2 driver license. a few years later i trained on the successor of it. but the old one was such a cool technology. and, we called em the “Kotz o Mat” witch is mean the trow up machine 😂