The ability to change direction without turning is the specialty of omnidirectional wheels, which [maker.moekoe] used to their full potential on a pair of ESP32-controlled robots. Video after the break.
Thanks to the rollers on the wheels, the wheels could be arranged at 120° in relation to each other on the 3-wheeler and 90° 4-wheeler. [maker.moekoe] used ChatGPT and a simple python simulation to find and verify the motor control algorithm required for smooth omnidirectional driving.
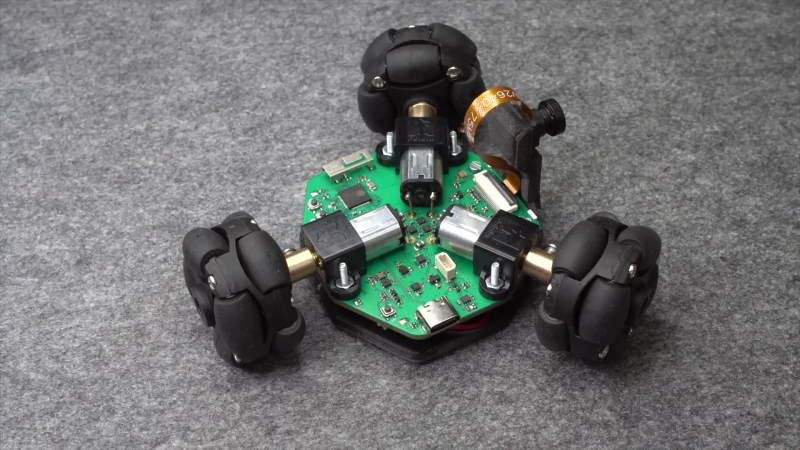
A single custom PCB incorporates all the electronics, and doubles as the robot’s chassis, with the geared brushed motors bolted directly to it. An ESP32-S2 runs the show, and can also stream FPV video from the same OV2640 camera used on the popular ESP32-cam modules. The LiPo battery is held by a 3D-printed support plate screws to the bottom of the PCB. The robots can controlled by a simple web-app served by the ESP32, or a using the IMU on custom controller also built around an ESP32-S2 which uses the ESP-NOW wireless protocol.
Even though the robots’ software is still in the early stages, the movement looks extremely smooth and effortless. Plus, their all-in-one PCB chassis makes for an elegant and clean build














Oh that tiny remote at the end, nice touch.
I HATE videos, is there a link to code and website without have to waste time on a video?
Look at the video to find it out :)
… Nobody is forcing you to look at the video if you don’t want to
I checked, he has an instructables and github for projects but didn’t find anything for this project (yet?)
I’m furious. shame.
The robot has nearly no ground clearance.
Given the requirements for that drivetrain to function properly, that’s probably moot.
The robot will get stuck on every doorstep. Just flip that thing around, mount the camera on the other side, and maybe move also the camera connector to the bottom side of the PCB.
I concur, it’s built upside down, about a third diameter of the wheel is pretty reasonable ground clearance in general.
What still bothers me is that the plastic plate almost brushes over the carpet, causing it to become electrostatically charged. In the worst case, a spark jumps over to the PCB and fries the semiconductors.
Excellent work.
A paper about motion control calculation :
https://www.scirp.org/journal/paperinformation.aspx?paperid=102349
Thanks
add one leg to jump and flip when it is necessary
(similar military robots) or moving up-down whelss (but this is difficult)
please show how this robot ride on non flat ground
Nice. Just wondering why you didn’t use a read-made ESP-32 module? If you’d want to produce and sell these platforms, you would now first have to go through the FDA approval, I think?
I think you mean FCC, FDA is food and drug which has nothing to do with emi/emc
IANAL, but I thought if you sell a “component”, you don’t need FCC approval, because whoever assembles it is responsible to make sure it complies. So if you sell the PCB without wheels, it’s not a full product and you can get around this.
i almost reported your comment until i realised U started with an acronym and not a preposition oops…
What would happen if you replace the camera with a 360 camera version?