What is a brushless ESC, really? Well, generally, it’s usually a microcontroller with a whole lot of power transistors hanging off it to drive three phases of brushless motor coils. [Frank Zhao] realised that with a little reprogramming, you could simply use a brushless ESC to independently run two brushed motors. Thus, he whipped up a custom firmware for various AM32-compatible ESCs to do just that.
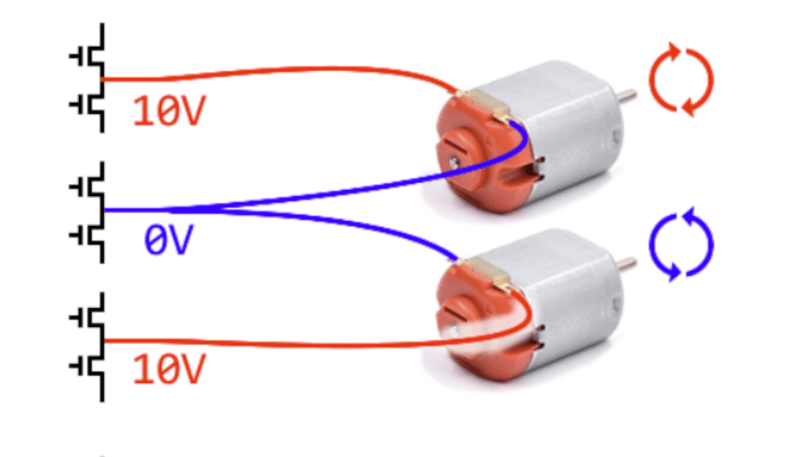
The idea of the project is to enable a single lightweight ESC to run two brushed motors for combat robots. Dual-motor brushed ESCs can be hard to find and expensive, whereas single-motor brushless ESCs are readily available. The trick is to wire up the two brushed motors such that each motor gets one phase wire of its own, and the two motors share the middle phase wire. This allows independent control of both motors via the brushless ESC’s three half-bridges, by setting the middle wire to half voltage. Depending on how you set it up, the system can be configured in a variety of ways to suit different situations.
[Frank’s] firmware is available on Github for the curious. He lists compatible ESCs there, and notes that you’ll need to install the AM32 ESC firmware before flashing his version to make everything work correctly.
The VESC project has long supported brushed motor operation, too, though not in a tandem configuration. Meanwhile, if you’ve got your own neat ESC hacks, don’t hesitate to hit us up on the tipsline!














There are already many stock ESC’s that do this already without changing any firmware.
Links please!
I haven’t seen any that can control each motor independently like this.
Works the other way too: You can use a bipolar amp to drive a 3-phase motor.
What is an ESC? Not explained in a single place in the article
Electronic Speed Controller :)
Electronic Speed Controller, mostly used in hobby radio control airplanes, helicopters , cars.
wow! ESCs these days have exposed st-link connections?! i was reading this article thinking “yeah but the ESC will need new firmware” and i was quite surprised to find that’s assumed! pretty neat
Nice. However calling that “use a brushless ESC to independently run two brushed motors.” Is over simiplyfied. You are dependent in first motor what direction spin other in amount of torq which you can generate
Actually I’ve thought about this already, but the PWM timings says that the current is either sinked or sourced by the “middle” half-bridge, not just the “sides”, so even the current flow is independent for both motors, and thus torque from one motor is not affecting another motor.
It’s probably important that all 6 timer PWM outputs are from the same timer and the first edge is synchronized, or else this wouldn’t work.
It’s an old trick to run a brushed DC motor in both directions with variable speed out of a single PWM output by connecting the other lead to a source with half the peak voltage. At 50/50 duty cycle the motor is stopped.
That’s one advantage that brushed motors still have, but it doesn’t behave very well for larger motors.
Is there anyone who enjoys designing ESCs (high performance circuitry)
Let me know
I want to learn the basics as soon as possible
Great Scott did a similar project
Many years ago Castle Creations had software to allow a Phoenix controller to drive two sets of LED lights.
Old comment but you could actually drive anywhere from 1-3 sets of LEDs from any brushless speed controller.
Course you’re going to need to match the forward voltage of the diodes with the voltage that The battery outputs. And you’re going to need to be careful with current limiting but all this can easily be accomplished. I’ve even done it on a plane with the motor connected to the ESC is normal with three sets of LEDs on series as a strip light, each of those strips were then connected in parallel to each phase. Ground worked both with the normal DC battery ground as well as the center tap we’re all three phase windings are tied together in the motornot the center tap of the windings.