In a bout of frustration I recently realized that the roads have all updated — most people have no idea how — and this sometimes hurts the flow of traffic. This realization happened when an unfortunate person stopped in a left turn lane well before the stop line. The vehicle didn’t trigger the sensor, so cycle after cycle went by and the traffic system never gave the left turn lane a green light, thinking the lane was unoccupied. Had the driver known about this the world would have been a better place. The first step in intelligent automation is sensing, and there are a variety of methods used to sense traffic’s flow.
Many stoplights run on timers that do the same thing on a loop. First they were electromechanically controlled, and now they are digital. When sensing technology arrived, it made systems intelligent enough to adjust the cycle based on traffic. Nobody in the left turn lane? Don’t bother with a left turn signal in the cycle, and it shaves some seconds off and allows for smoother traffic flow.
Inductive Loops
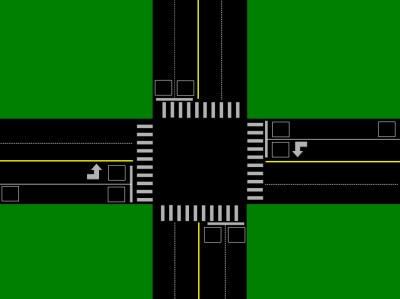
You’ve probably seen them, but never considered what they are or how they work. Most often at stoplights, but sometimes before the stoplight, there will be a square in the pavement. This is where the road was cut, and a loop of wire inserted, then covered. The loop of wire is an inductor, and a large piece of metal next to it will induce eddy currents, which are measured by the system. If the piece of metal doesn’t generate enough eddy currents (say from a bicycle or motorcycle), the system will not recognize the presence of anything. It also means that if you drive past the stop line so that your car is no longer over the loop, then you may not be detected and the traffic control logic will skip you in the next cycle.
The takeaway with inductive loops is that if you go through a full cycle of lights and don’t get a turn, it’s likely because you’re not triggering the sensor.
If the loops are a ways back from the light, they might be used to trigger the light to start turning for you so you don’t need to stop. This is useful when the light doesn’t cycle based on time but instead defaults to green in one direction, and you are approaching from the other direction. If the system doesn’t see any traffic on the normally green side, it will change the light so that you can coast through without stopping, then change back to the default.
If you see two loops in a single lane, usually on a highway, and one is right after the other, then you’re looking at something that measures speed of a vehicle driving over it. This is usually on the highway or heavily trafficked roads at higher speed, and can be used for general data collection, or to feed the signs that say “8 minutes to I-80”. If the hardware and firmware are good, the induction can be measured well enough that the type of vehicle and number of axles can be calculated. A semi traveling over a loop would increase the baseline, with a short spike at each axle.
Radar

Of course issuing tickets isn’t the only radar application you’ll find in the traffic technology arsenal. Remote Traffic Microwave Sensing (RTMS) is a technology used to go beyond what inductive loop sensors can do. RTMS is usually positioned at the side of the road, sensing perpendicular to the movement of traffic. Available sensors like the Sx-300 boast capabilities like “per-lane presence as well as volume, occupancy, speed and classification information in up to 12 user-defined detection zones”. The image shown here is an RTSM G4/K4 seen installed on a New York City street. Thanks to the FCC filing you can page through the user manual which is quite interesting.
Infrared

Cameras
You’ll see cameras on the light pole above the stoplights. These can be visible light cameras or infrared cameras. The infrared cameras are not affected by vehicle headlights and are less affected by precipitation than a visible light camera, but they both work on the same principle of doing lots of image analysis to determine presence and speed of vehicles.
E-ZPass/Toll Booths
One of my hobbies while driving is to make funny faces at the toll booth cameras as I drive through them. I like to think that somewhere there is a database with photos attached to every time I’ve driven through a toll. The reality is that it’s probably purged after a few days and I’m making funny faces for no reason, but it does get the other occupants of my vehicle engaged.
 The tags are active RFID transponders at 915Mhz, and draw very little current from their battery. We’ve covered E-ZPass a little in the past. The cameras are there to capture the license plate and verify the pass with the plate, or charge people driving through the toll without the electronic tag. The passes are useful outside of toll booths as well, so that scanners in other places can be used to populate travel time signs.
The tags are active RFID transponders at 915Mhz, and draw very little current from their battery. We’ve covered E-ZPass a little in the past. The cameras are there to capture the license plate and verify the pass with the plate, or charge people driving through the toll without the electronic tag. The passes are useful outside of toll booths as well, so that scanners in other places can be used to populate travel time signs.
Road Tubes
These are rubber tubes that extend across the road to a base station. A vehicle passing over it compresses the tube briefly, and the change in pressure is measured at the station. The number of axles is detected, and with some tricky algorithms, the number of vehicles calculated. This can be difficult with cars driving over it simultaneously, vehicles with more than 2 axles, or other complicating situations, so error rates can be as high as 10%. When you see two tubes next to each other at a fixed distance apart, then it’s capable of calculating a lot more accurately, and it can give speed and direction.
As far as I can tell, road tubes are only data loggers and don’t upload information in real time yet, so you don’t need to worry about the road tubes being used as live speed traps.
Preemption
When an emergency vehicle is approaching, sometimes intersections will have sensors to detect this and change the traffic so that the light will allow them to pass. These sensors can be acoustic and listen for specific siren triggers, light-sensitive and watch for specific strobing patterns (flashing your headlights will not work), and radio. [Dan Maloney] recently discussed preemption hacking in more detail (hint: don’t).
Big Data
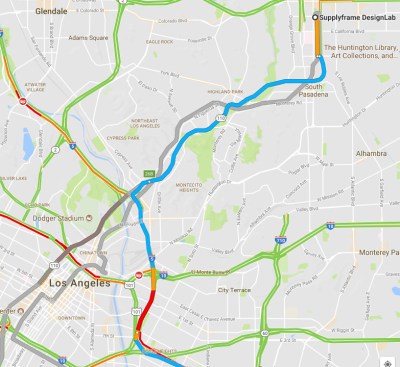 Many people now drive everywhere with Google Maps or Waze directing them. Their real time location is uploaded and used to determine if there are traffic jams, estimate drive time, and find alternate routes. It’s normal now for my phone to say “There is a slowdown causing a 10 minute delay. You are no longer on the fastest route.” Then I click a button and it redirects me to avoid the delay.
Many people now drive everywhere with Google Maps or Waze directing them. Their real time location is uploaded and used to determine if there are traffic jams, estimate drive time, and find alternate routes. It’s normal now for my phone to say “There is a slowdown causing a 10 minute delay. You are no longer on the fastest route.” Then I click a button and it redirects me to avoid the delay.
This kind of power is incredible and slightly disturbing. It can be used to save millions of hours of drive time and gallons of gas, but could also be exploited to redirect people or cause traffic jams.
Further Reading
If you want to go deep into the rabbit hole, the Federal Highway Administration has a surprisingly fascinating handbook on traffic detection. It’s slightly out of date at 2006, but covers most of these topics in great detail. If you know the story behind sensor technologies that I didn’t cover, we’d love to hear about the in the comments below.















When there’s multiple loops in the turn lane, I figured that the system could use that to anticipate how much longer the arrow needs to stay on — cars are still moving through the further-back loop, so we need to run it longer (obviously up to a limit).
This certainly is done in some places. It is also common to set back the loop so that the left turn arrow is only activated when there is a line up of cars.
An intersection near where I live has loops on the turn lane AND loops on te receiving lanes (where you’d go if you turn from the turn lane). If I deliberately miss the sensor on the far end with the motorcycle it’ll leave the turn arrow on an extra couple of seconds. It is sorta neat, but the portion of such sensors that can’t reliably detect a motorcycle is really irritating.
Imagine being a motorcyclist and the sensor never triggers.
Bicyclist here. I often have to wait a full cycle for a car to trigger the light. I used to try to trigger them with my bike when it was steel, but I don’t bother now that it’s carbon.
If the way is clear, the law in my state says something like if you wait a reasonable time and the light doesn’t change, you can proceed as though it were a stop sign. I think that may only be true for bicycles though.
I’ve heard of attaching a strong magnet to your shoe, have you tried that?
Yep, motor cyclists also glue a neodynium magnet on their bellypan.
I used to trigger them with my boot’s steel toe, when I was riding my (motor-)cycle back from work.
Park near the edge of the detector loop, and kick my foot back and forth across the tar seal line over the loop. Typically would detect and switch quickly after.
The rims should do it (unless they’re carbon as well). Call DOT and ask them to adjust the sensitivity.
Are YOU that cyclist in the left hand turn lane of a four lane highway with an 80km/hr or 50 MPH speed limit? At least you are following some of the traffic laws – most cyclist here ignore things like stop signs and traffic lights
I wonder how well the IR sensors see EVs and bicycles?
Most of them just work by the vehicle breaking the cone of light vs receiving far IR.
As for the flir based kind it might still see a bicycle or EV if it’s image forming the software may not see the image as a vehicle it though a high powered EV such as a Tesla S probably gives off as much heat as a small gasoline car esp if the AC is on.
I see people stop way out in the intersection every single day and i just shake my head. You stop behind the line, not in front of it. You’d think they would eventually get it.
Sometimes this is accounted for when laying down the loops. Intersection designers are well aware of bad drivers, but they can only do so much.
Yah any good design would take that in account as failure to detect a vehicle and forcing them to wait until another car comes along to trigger it would increase the chance of them running a red light and thus cause more accidents.
Impatient drivers are the bane of everyone’s existence.
Anyone else look at that first image and see a LQFP footprint?
+1
It must take a lot of solder paste to mount that chip!
B^)
Massachusetts DOT confirms the “8 Minutes to I-90” signs are driven by sensing Bluetooth in cars that have it, anonymizes the address (as if), starts a clock and then looks for the scrambled address on the far end, Gives a whole new meaning to Wardriving.
I want to see a real time traffic map of the US during the eclipse…
Do all the highways go red,when people pull over to watch? ;D
When the space shuttle flew into Dulles Airport people literally stopped where they were and got out to watch. So, yeah, go red is yes.
In the Netherlands, there are almost always 2 loops in front of each light. The one just in front of the line is to detect the presence of car(s). The one further away (usually a longer loop) detects the presence of oncoming cars (also common), however the yellow light will extend its time a second (or two) to make sure that your car can pass the yellow light instead of having to brake (very) hard just in front of the red light.
This extra yellow time is very handy. I always watch for the first loop. If I am over the first loop and the light turns yellow, I will be able to pass the yellow light. (At normal speed)
Some places (to save money?) put the loop for the turn lane one car space back from the line. Then, if there are 2 or more cars waiting, the turn light will trigger in the next cycle. Otherwise one car is ignored.
Here in Vancouver, (many) left turn lanes have 2 sensors – one at the line, the other _2_ cars back. Initially, the programming was such that stopping on the back sensor would give you a green turn arrow at the next cycle, if you got there early enough during the red. I suppose too many of us wised up to that so the programming was changed such that both sensors must be tripped to get the green arrow. Now you can identify drivers with a clue because they leave a 1 car gap between themselves and the first car in the left tun lane. But they seem to be well outnumbered by the clueless that are completely oblivious.
I live next to a Pennsylvania State Bike Route. The only live sensors are in the left turn lane. Took me 15 years to figure this out. No problem triggering the light if I ride down the left turn lane. They have loops in the right lane, but I guess they don’t want to allow cyclists to trigger them for some reason. A car or truck will trigger from one lane over.
If anyone wants more info on traffic sensing, here is the official DOT handbook:
https://www.fhwa.dot.gov/publications/research/operations/its/06108/06108.pdf
Covers everything from sensor types to calculations for the inductive loops. The detectors themselves usually utilize some variation of an LC Colpitts oscillator, operating between 20 and 100 kHz. A microcontroller will sample the incoming signal and measure the frequency, looking for shifts indicative of a vehicle presence. You’ll see various features employed depending on the industry, such as sensitivity adjustment, switches for changing the loop frequency (accomplished by varying the capacitance in the oscillator), etc. If you’re looking for a fun embedded project, they’re neat little devices.
The “road tubes” are used to get volume and speed data on a roadway (we just call them hoses). I’ve laid them out for a traffic engineer I work for multiple times. It’s usually driven by a development going in nearby that will add more traffic to the roadway and is in response to municipal or state DOT requirements for performing a traffic study. Typical spacing is 8′ for doing speed and volume. Often when we put them on the road, it’s just to get volume that is existing, but we will also space them to get the speed data in case someone comes back and asks for it later. The pressure sensors are just piezo elements at the end of the hose connected to a microchip. Those units cost close to a grand and can be replicated by an arduino and plus about $10 in other electronic parts. The case that houses it is usually capable of being run over by a fully loaded dump truck though. They used to make them with a solar charger cover, but the battery lasts years in them since they are so low power that they stopped since it was unnecessary. I’ve had people not want a development and try to mess with the units by flipping it over or taping paper over the solar cover; didn’t do anything. I tell people that if they want to mess with the study, then they need to drive up and down the road a couple hundred times a day, as fast as they can so it increases the volume and speed info for the roadway.
You are correct that they are only data loggers. Someone has to collect the box and plug it in to a PC to download and analyze the data. The report generated is used to determine what improvements need to be made to the road system and intersections in that area for the development to go in. Occasionally the state or municipality will put them out for their own study reasons too. They are not used as a speed trap any where that I know of since you’d also need someone on the side of the road with a laptop, reading the data that’s produced and then relaying it to a cop to pull you over. I’ve almost rear ended people that treat the hoses like a speed bump and slow down before driving over them.
My dad used to joke about going out there with a mallet and thumping on the things for a while. Never did, as far as I know, but I’ve always wondered if it would register.
Do the loggers discriminate between large and small vehicles, motorcycles and bicycles? Seems to me that the waveform coming off the transducer should be able to hint at that data, maybe not 100% accurate every time, but enough to get an idea of the mix. Add another column for mallets…
It seems odd to me that the data collection isn’t cellular now. I guess if you have to go out there and retrieve the box and hoses anyway, there’d be no sense in it, but that never stopped a useless IoT product from getting to market before…
When we put the hoses down, to make sure there isn’t a hole in it and sensing correctly, we just bounce on them with the heel of our foot. It will sense that, so yes a rubber mallet would most likely work. It needs a sharp spike so a step on it doesn’t get detected, but a quick bounce will. Just do it on a piece of hose close to the sensor and not at the far end. They don’t detect different vehicles, just when they are tripped and the timing between the first and the next. A motor cycle has a smaller wheel base so it would theoretically be possible to tease them out of the data somewhat, but in the end the units count axles.
Why add cellular? The companies that make them don’t have to do much to update them, the cost of cellular would double their manufacturing cost (or maybe even more), the hoses only last so long so you wouldn’t leave these out for months (they get left out for a week max) so you still have to go get the unit, they get moved around a bunch from one project to the next, so you always just download and move on. I expect they’ll add it in eventually, but we wouldn’t buy one.
8 feet? We use 2 feet for our counters! (Jamar and Diamond counters). Ours only collect pulses during the study and then we can process for anything (volume, class, speed, headway/gap).
Your comments about cost are spot-on. I’ve gutted a Jamar counter and there’s a fair bit of electronics in it, but mostly low-cost passives and a PIC microcontroller, but the case is built to withstand anything. I’ve been shown pictures of some of the older Jamar counters that have been doused with gas and set on fire, and they were still able to get the data from the counter. Also, the Boston Police blew up a Jamar counter and Jamar claims they were able to download the data from it. I’ve only heard from Jamar, I imagine Peek, Diamond, and Metrocount have similar stories.
I’m sure ours could do more analysis, I didn’t get into it though (we used Jamar). I’d help with setting up and all around on projects, but mostly focused on stormwater and permitting. We could do 2′, but if the hose wiggled or was set slightly off, it showed more errors so we made it standard to do 8′. Off an inch on 2′ is 4% error in speed, off an inch on 8′ is 1%. I’ve seen the Boston PD video of them blowing one up. Had a coworker attach the hose to the counter before having it fully taped down. A dump truck snagged a hose and dragged the counter a few hundred yards down the road before it came off and was just fine. The rule was “hoses are attached only after being fully taped down AND the unit is chained.”
Have you used the hand counters for intersections. Those are just some buttons and a micro controller and cost about $700. They are also one of the most ergonomically annoying units to use. I prefer a sheet of paper, a couple pens and an alarm to change out every 15 minutes.
Well, that explains it. I waited like a half hour for the attendant to come out and pump my gas, but they never showed up.
Hey, that’s an old Mac motherboard battery! (The one on the EasyPass, that is.)
I wonder if I’m the only one that caught the Starman reference.
Aw man, I just watched Starman like two weeks ago and I missed the reference. Good catch.
Those aren’t eddy currents; the loops are excited with a frequency, and the metal changes the inductance of the loop, and thus the frequency, which can be detected even for a quite small change. A thin road bike rim is enough if the sensor is adjusted properly.
What about Bluetooth Sensor Technology as described here: http://blipsystems.com/traffic-anomalies-no-longer-a-mystery-thanks-to-drivers-bluetooth-devices/
We’re going to have smart freeways here however we don’t have tolls. Would love to know more about how these smart sensors would benefit road traffic. The premise is that each lane will have its own speed limit which sounds rather bizarre.