
The ground-effect (GE) refers to the almost mystical property where the interaction of the airflow around an aircraft’s wing and the ground massively increases efficiency due to the reduction of lift-dependent drag, perhaps best demonstrated by the Soviet Lun-class “ekranoplans” of the 1980s and 90s. Interestingly, this principle also applies to rotary aircraft, which led the [rctestflight] YouTube channel to wonder what would happen if a quadcopter were to be adapted for GE.
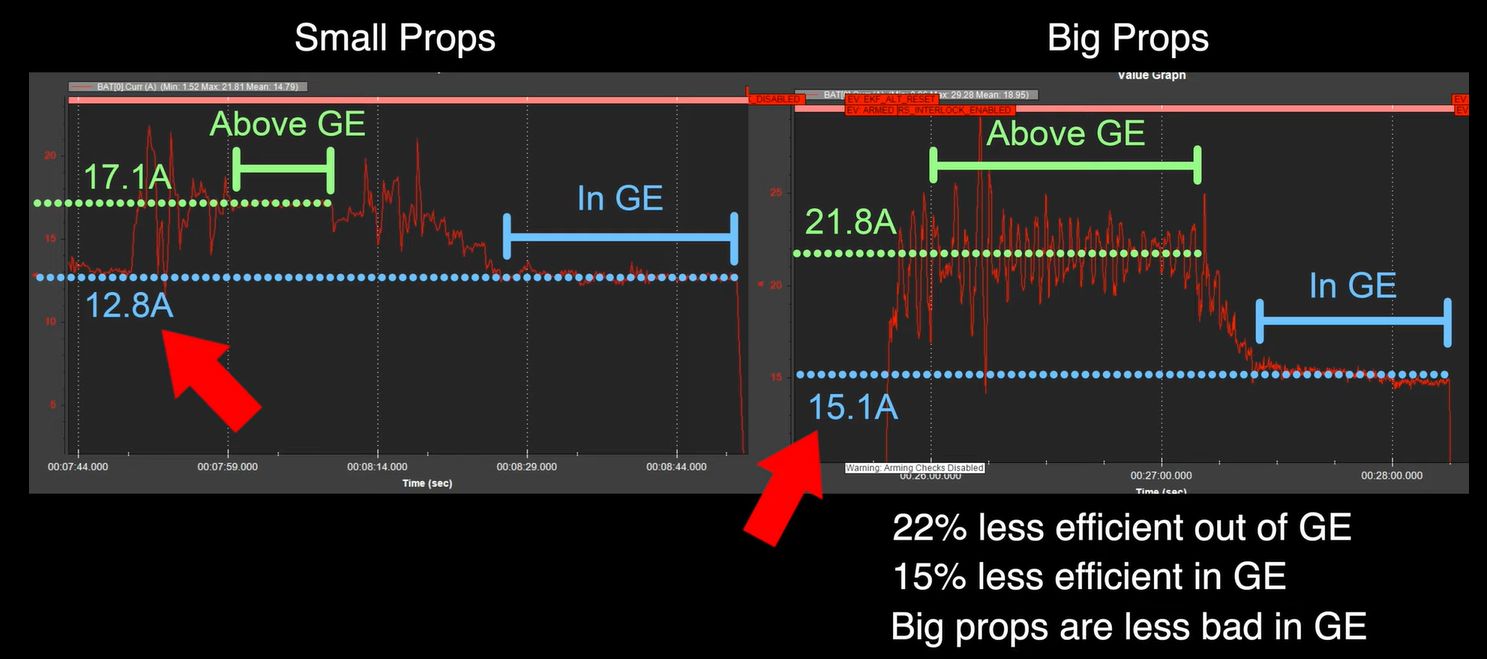 As noted on the Wikipedia entry for Ground-effect vehicle (GEV), it’s essential to have some kind of forward motion. With a rotorcraft like a helicopter or quadcopter this motion is already provided by the spinning propeller, which makes it noticeably easier to get the aircraft into the ground-effect. operating mode. Following the notion that the GE becomes noticeable at an altitude that’s dependent on the length of the aircraft’s wings, this got translated into putting the largest propellers available on the custom inverted-prop (to put them lower to the ground) quadcopter, to see what effect this would have on the quadcopter’s performance. As demonstrated by the recorded current drawn (each time with a fully charged battery), bigger is indeed better, and the GE effect is indeed very noticeable for a quadcopter.
As noted on the Wikipedia entry for Ground-effect vehicle (GEV), it’s essential to have some kind of forward motion. With a rotorcraft like a helicopter or quadcopter this motion is already provided by the spinning propeller, which makes it noticeably easier to get the aircraft into the ground-effect. operating mode. Following the notion that the GE becomes noticeable at an altitude that’s dependent on the length of the aircraft’s wings, this got translated into putting the largest propellers available on the custom inverted-prop (to put them lower to the ground) quadcopter, to see what effect this would have on the quadcopter’s performance. As demonstrated by the recorded current drawn (each time with a fully charged battery), bigger is indeed better, and the GE effect is indeed very noticeable for a quadcopter.
Getting a usable GEV out of the basic inverted-prop quadcopter required some more lateral thinking, however, as it was not very easy to control this low to the ground. Here following design cues from skirtless hovercraft designs helped a lot, essentially drawing on the Coandă effect. Although this improved performance, at this point the quadcopter had been fitted with a fifth propeller for propulsion and was skidding about more like a skirtless hovercraft and less of a quadcopter.
Although great for scaring the living daylights out of unsuspecting water-based wildlife, what this unfortunately demonstrates is that GEVs are still hard, no matter which form they take. At the very least it does make for an excellent introduction into various aspects of aerodynamics.
Continue reading “Exploring Ground-Effect With A Quadcopter”










