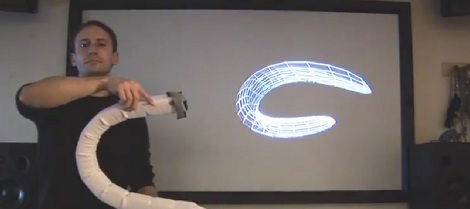
[Joseph Malloch] sent in a really cool video of him modeling a piece of foam twisting and turning in 3D space.
To translate the twists, bends, and turns of his piece of foam, [Joseph] used several inertial measurement units (IMUs) to track the shape of a deformable object. These IMUs consist of a 3-axis accelerometer, 3-axis gyroscope, and a 3-axis magnetometer to track their movement in 3D space. When these IMUs are placed along a deformable object, the data can be downloaded from a computer and the object can be reconstructed in virtual space.
This project comes from the fruitful minds at the Input Devices and Music Interaction Lab at McGill University in Montreal. While we’re not quite sure how modeled deformable objects could be used in a user interface, what use is a newborn baby? If you’ve got an idea of what this could be used for, drop a note in the comments. Maybe the Power Glove needs an update – an IMU-enabled jumpsuit that would put the Kinect to shame.









