Machinist, electronics engineer, programmer, and factory worker are all skills you can wield if you take on a project like building this omniwheel robot (translated).
The omniwheels work in this tripod orientation because they include rollers which turn perpendicular to the wheel’s axis. This avoids the differential issue cause by fixed-position wheels. When the three motors are driven correctly, as shown in the video below, this design makes for the most maneuverable of wheeled robots.
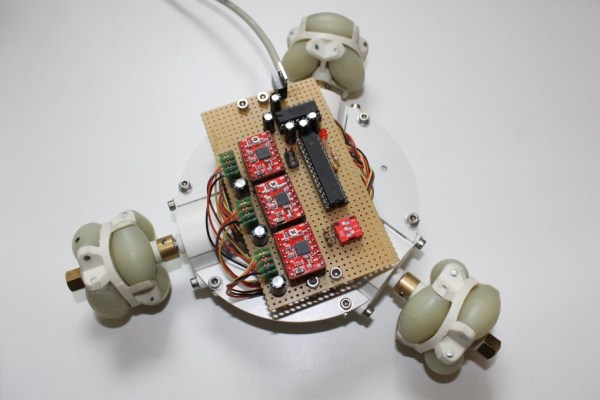
An aluminum plate serves as the chassis. [Malte] milled the plate, cutting out slots for the motor with threaded holes to receive the mounting screws. A few stand-offs hold the hunk of protoboard which makes up the electronic side of the build. The large DIP chip is an ATmega168. It drives the motors via the trio of red stepper motor driver boards which he picked up on eBay.
So far the vehicle is tethered, using a knock-off of a SixAxis style controller. But as we said before, driving the motors correctly is the hard part and he’s definitely solved that problem.
Continue reading “Omniwheel Robot Build Uses A Bit Of Everything”












