As kids we’ve all let a friend use a toy only to have it returned broken. That was such a bummer! At least that was years ago though…. well not for [Tom]. He had a Hubsan X4 mini quadcopter that he had crashed into all sorts of things. The little quad held up good against all of the beatings so [Tom] didn’t think too much about letting his pal take it for a test drive. Thirty seconds later, several separate pieces of the quad were laying in the dirt.
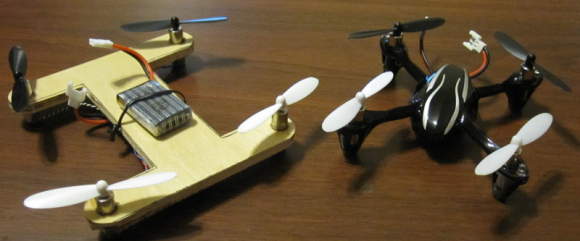
A new X4 was ordered but there was some time to kill waiting for it to show up. Since the electronics seemed to be intact and only the frame was broken [Tom] decided to try his hand at making a new frame. Keeping costs under control is an important part of any project and this one was no different. The frame would be made of cheap and rigid 5mm plywood. The only potential problem would be the weight. [Tom] cut out a piece of the plywood and weighed it, then measured the volume and calculated the density of the wood. The wood’s density was used to estimate the final weight of new plywood frame designs and shapes. This worked so well that the newly built quad only weighed more than the original by 0.31 grams, less than 1% increase in the total weight!
Continue reading “Frankensteined X4 Quad Is Brought Back To Life”










