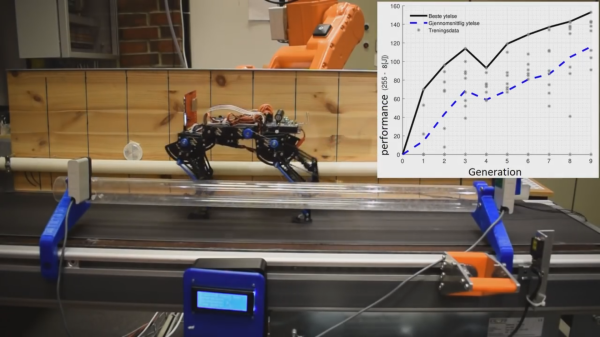
Most humans take a year to learn their first steps, and they are notoriously clumsy. [Hartvik Line] taught a robotic cat to walk [YouTube link] in less time, but this cat had a couple advantages over a pre-toddler. The first advantage was that it had four legs, while the second came from a machine learning technique called genetic algorithms that surpassed human fine-tuning in two hours. That’s a pretty good benchmark.
The robot itself is an impressive piece inspired by robots at EPFL, a research institute in Switzerland. All that Swiss engineering is not easy for one person to program, much less a student, but that is exactly what happened. “Nixie,” as she is called, is a part of a master thesis for [Hartvik] at the University of Stavanger in Norway. Machine learning efficiency outstripped human meddling very quickly, and it can even relearn to walk if the chassis is damaged.
We have been watching genetic algorithm programming for more than half of a decade, and Skynet hasn’t popped forth, however we have a robot kitty taking its first steps.