[Tim] needed very small, motorized joints for a robot. Unable to find anything to fit the bill, he designed his own tiny, robotic joints. Not only are these articulated and motorized, they are designed to be independent – each containing their own driver and microcontroller.

[Tim] originally tried 3D printing the pieces on his Lulzbot but it wasn’t up to the task. He’s currently using a Form 2 with white resin, which is able to make the tiny pieces just the way he needs them.
https://www.youtube.com/watch?v=FRLWj9tiy94
[Tim]’s quiet about what the robot these joints is for will be like, but he did reveal that he foresees it using “lots” of these joints, so he’s been spending some time planning the wiring and communications as well as refining the design. We’re very curious about how it will all turn out.
People roll their own robotic joints and appendages when they have specific needs that can’t be met by current offerings, and the prevalence of 3D printing has made this process far more accessible than it has ever been before. For example, take a look at this unusual looking robotic appendage designed by [Kris] back in 2010; it’s worth a look just for how incredibly intricate it is.















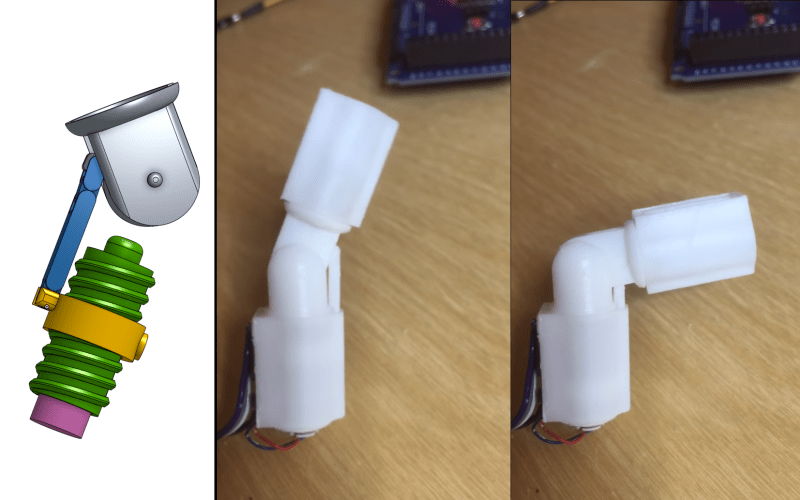
Slick design. Took a second to realize that the upper part of the joint is actually the housing for the next motor/gear/chain. So, the entire joint is quite a bit smaller than in the video.
For a moment I hoped the LEGO figure is articulated… Well, maybe next time.
I was going to make a nasty comment about sticker shock on those 6mm planetary gear boxes, but the Polulo motors they’re using aren’t that bad (only about $12) Hmm…
You can also get similar motors for just a few dollars on eBay. In my testing they are very similar unless you’re working near the limits. You can visually tell where Pololu has directed a higher quality product, but you have to be willing to pay for that too.
A banana for scale would be great.
He’s building microbots of course!
Chobits.
I quite like to use mini glue sticks. I guess it was only a matter of time with a 3D printer.
But its open loop though. How would you know if the command given to move a certain amount got executed or not?
its not:
“The actuator uses feedback from hall-effect sensors to determine the position of the linear actuator, and based on the input from from a master controller, moves the actuator appropriately.”
from https://github.com/aanon4/RingNet-Linear-Actuator/blob/master/RingNet_Linear_Actuator.ino
Having watched the Lego Movie recently, all I can think now is “Spaceship-spaceship-spaceship! SPAAAACESHIIIIP!”