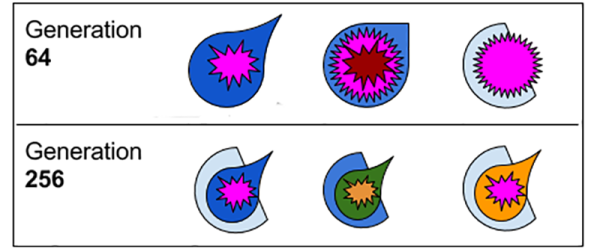
Evolutionary algorithms are an interesting topic of study. Rather then relying on human ingenuity and investigation to create new designs, instead, an algorithm is given a target to achieve, and creates “offspring”, iterating in an evolutionary manner to create offspring that get closer to the target with each generation.
This method can be applied to the design of electronic circuits, and is sometimes referred to as “hardware evolution”. A team from Duke University attempted exactly this, aiming to produce an oscillator using evolutionary techniques.
The team used a platform called the “evolvable motherboard”, or EM. The EM is a platform controlled by an attached computer, consisting of reconfigurable solid state switches that allow attached circuit components to be interconnected in every combination possible. These components may be virtually any electronic component; in this experiment, 10 bipolar transistors were used.
The evolutionary algorithm was given a fitness function that rewarded output amplitude and frequency, aiming to create an oscillator operating at 25KHz. However, the team noticed some interesting emergent behavior. The algorithm tended to reward amplification behavior from the circuit, leading to many configurations that oscillated poorly, but amplified ambient noise. In the end, the algorithm developed circuit configurations that acted as a radio, picking up and amplifying signals from the surrounding environment, rather than oscillating on their own. The evolutionary algorithm took advantage of the interaction between not only the circuit elements, but effects such as the parasitic capacitance introduced by the switching matrix and appeared to use the PCB circuit traces as an antenna.
The team conclude that evolutionary algorithms used in circuit design ignore human preconceptions about how circuits work, and will take advantage of sometimes unpredictable and unexpected effects to achieve their targets. This is a blessing and a curse, bringing unconventional designs to the fore, but also creating circuits that may not work well in a generalized environment. If your “oscillator” relies on a nearby noise source to operate, it may operate unpredictably in the field, for example.
We’ve seen evolutionary algorithms used before, such as being applied to robotic design.