In recent years, quadrotors have exploded in popularity. They’ve become cheap, durable, and can do some really impressive things, but are they the most efficient design? The University of Queensland doesn’t think so.
Helicopters are still much more efficient and powerful due to their one big rotor, and with the swashplate mechanism, perhaps even more maneuverable — after all did you see our recent post on collective pitch thrust vectoring? And that was a plane! A few quick searches of helicopter tricks and we think you’ll agree.
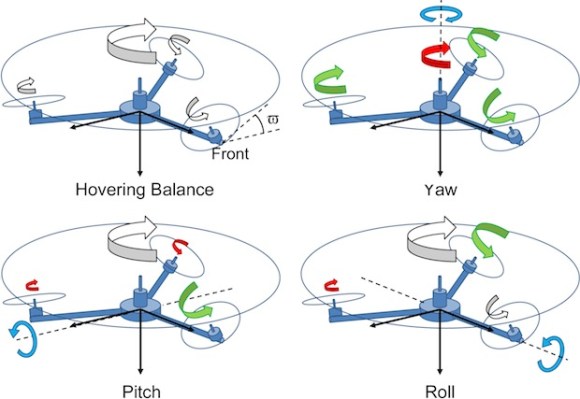
The new design, which is tentatively called the Y4, or maybe a “Triquad” is still a quadrotor, but it’s been jumbled up a bit, taking the best of both worlds. It has a main prop with a swashplate mechanism, and three smaller rotors fixed at 45 degree angles, that provide the counter torque — It’s kind of like a helicopter with three tails.
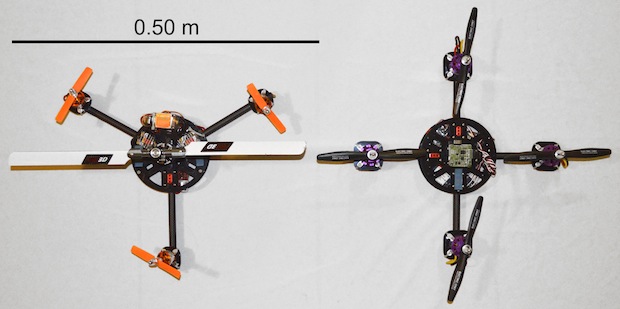
Regarding efficiency, the researchers expect this design could achieve an overall increase of about 25% in performance, compared to that of a standard quadrotor. So, they decided to test it and built a quad and a Y4 as similar as possible — the same size, mass, batteries, arms, and controller board. The results? The Y4 had an increased run time of 15%! They think the design could very well make the 25% mark, because in this test study, the Y4 was designed to meet the specifications of the quad, whereas a more refined Y4 without those limitations could perhaps perform even better.
Unfortunately there’s no video we can find, but if you stick around after the break we have a great diagram of how (and why) this design works!
[via IEEE Automation]














The big benefit of a Quadcopter is the simple build. You have no moving parts except motors. Not even a servo. That enables you to build very sturdy frames with ease.
Tricopters suffer very badly from stripped (broken) yaw servos or other mechanical problems regarding the yaw mechanics. You just don’t have these problems on a Quadcopter.
Was going to point out exactly the same thing! KISS principle FTW
If you read the linked article all of the rotors are FIXED pitch and the smaller rotors are FIXED angle. So the only added challenge in this build is making the smaller rotors lean at 45 degrees.
But with a swashplate mechanism, which is a complex mechanical part! They have 4 motors too! Quadcopter are much simpler.
There is no swashplate in this configuration.
Um…you really should re-read the article again. That’s how it improves efficiency, it clearly states that it incorporates a swash plate mechanism onto the center rotor hence adding a complex mechanical part the prior poster mentioned.
Once again, yes it does have a swash plate mechanism.
Quoted directly from the article,
“The new design, which is tentatively called the Y4, or maybe a “Triquad” is still a quadrotor, but it’s been jumbled up a bit, taking the best of both worlds. It has a main prop with a SWASHPLATE MECHANISM, and three smaller rotors fixed at 45 degree angles, that provide the counter torque — It’s kind of like a helicopter with three tails.”
The difference in mechanical simplicity really isn’t as significant as you would think. There is no swash plate and no mechanical linkage in a quad, but you also have to add motor control and other electronics…you are just swapping mechanical for electrical (which is actually usually more bug prone than the other way around).
Quad rotors shine because the layout greatly simplifies the system of equations that govern stability. This makes it much easier to develop robust control software that can run on low power embedded systems.
Switching mechanical for electrical is good because the work has been done. Building these things is as simple as buying speed controllers and a flight controller. All the firmwares have been coded and are a download away. All one needs is basic assembly skills and a soldering iron. So there is value and use for switching the mechanical for electrical.
I’ll add that it’s far simpler to re-write firmware than to modify mechanical elements.
You beat me to this comment. I used to fly a tricopter but got sick of dealing with the servo on the tail for rudder authority. I now fly a vtail quad, flies just like a tricopter but no moving parts other than the motors. This is still useful info, just not really necessary for a hobbyist with how cheap RC batteries are these days.
Battery cost really isn’t the issue – you can only get so many batteries in the air so the more use you can get off of a battery charge the better.
If you have a rotor with a swash plate that’s big enough to lift the vehicle, why not just use a traditional heli layout? This is a good solution to the wrong problem.
Yep. If you favor efficiency over simplicity, why not go all out and use coaxial rotors?
There isn’t a swashplate – it still has the four motors as the only moving parts. Read the article.
The linked article refers to a “main fixed-pitch rotor”, but the summary here says “It has a main prop with a swashplate”. Oops.
And yet a chinook is faster and can carry more weight than any single rotored chopper?
Not a Heli mechanic or aero-engineer but I would attribute that to the fact that A) you have a larger rotor area than many single rotor craft B) it’s got some hefty turbines on it to provide thrust. To that end you the Mi-24 and AH-64 have quite impressive flight capabilities. The current speed record is held by the Westland (Super) Lynx, though until 1986 a bare bones Mi-24 variant held that honor.
nah, chinook is faster because tandem config lets it avoids dissymmetry of lift
Chinook: 315 km/h, 196 mph
Hind: 335 km/h 208 mph
Hind-A(V-24): 368 km/h, 228 mph
Lynx(stock): 324 km/h, 201 mph
Lynx(modified): 400.87 km/h, 249.1mph
X3 hybrid: 471.5km/h, 293 mph
So while the Ch-47 might be fast among strictly cargo helicopters. It’s not the fastest bird in the air. It might be the fastest helicopter while carrying cargo, but I couldn’t find any data on that.
Why did you guys change the subject to speed? out of the blue and completely inappropriately.
The efficiency discussed in the writeup is battery life and lift, and speed is not relevant.
(and incidentally in real life it are non-US made choppers who win that contest)
Speed matters. What good is a 15% flight time increase if your speed drops 25%?
Your comment is misdirected. I was responding to an erroneous claim.
Speed is a judge of efficiency. The original comment also suggested that multi-rotor craft have an inherent speed benefit, which judging on current designs is not the case.
The conversation did dip into ‘my country’s better than yours ‘territory, but speed as a whole is IMO entirely germain to discussions of efficiency. While hobbiests are interested in aerobatics, the real money behind these developments are interested in transport and combat capabilities. One design may provide more efficient lift in standard flight, another may be more efficient(task completion, not necessarily power consumption) in a different (combat)flight mode.
Again, not a Mech or Aero-E but I have to image having one big rotor drastically changes the flight characteristics of quadrotors compared to 4 identical rotors. Particularly when considering the impressive aerobatics put out by UPenn. .
This is simply not the case. There are several single-rotor heli’s that carry more weight (e.g. Mil Mi-26, Sikorsky Super Stallion) and quite a lot that fly faster (e.g. Westland Lynx, and of course the Sikorsky X2)
Runtime is mostly given by how much thrust (gramm/Watt) the Moter+Propeller combination makes, how heavy the quadrokopter is and the Wh/kg of the battery.
A general rule is that the bigger the rotor diameter the higher the g/Watt Value, and the longer the runtime. People that had driven this quit far here:
http://www.youtube.com/watch?v=syJq10EQkog
i estimate this to be 50-100 gramm/W.
And a battery powered quadrokopter:
http://www.youtube.com/watch?v=2ScZ8zDsVvk
i estimate this to be 18-25 gramm/W.
I’ve seen that Queendland University link a couple days ago and they do get some things right but generally they’re at neither extreme of the spectrum with their design. Each type of those powered flying machiines is a compromise between mechanical simplicity, cost, stability, power efficiency, size and so on. Their design is a step or a few steps in the power efficiency direction and away from simplicity, but you can go a few steps further and use a plain old helicopter, or, say, what they call singlecopter on multirotor forums (google it).
>It has a main prop with a swashplate mechanism
Where in the ACTUAL article does the word “swashplate” coming from? From the diagram, the main rotator doesn’t need one either.
Nowhere. All Props in the original article are fixed-pitch.
HaD doesn’t have much fame for proofreading their articles. Simply because they don’t.
More efficient? Check. More dangerous? Check. More complicated? Check.
I have often thought about this. I have a design that uses a single motor and belt system to drive 4 props that use gearing to create collective pitch thrust vectoring. Removing three of the motors combined with the collective pitch is amazingly efficient. But yes it does bring more complexity. I have a write up on it here ->
http://apexlogic.net/concepts/variable-pitch-prop-quadracopter/
Stingray 500 – video below
i have not read the article yet, but just looking at the diagram, there is no swashplate, and therefore no added complexity, just rearranged motors and a bigger main prop…
I thought this too, But, I looked at the photo on their site, and enlarged it. It definitely has some pitch linkage on the main rotor. I don’t think it is a full swash plate, but maybe a way of adjusting lift via pitch instead of rpm. It doesn’t have the cross bar balancing system of simple helicopters but the linkage is there.
BUT- text from the article
“Almost all of the triquad’s lift comes from its big main fixed-pitch rotor, located at the center of the “Y” (pictured below). The three little fixed-pitch rotors in the “Y” configuration are angled (at a fixed 45 degrees) to provide counter-torque (which they do slightly more efficiently than a helicopter tail rotor) along with pitch and roll control.”
Maybe it is just for fine tuning the main rotors lift/speed against the smaller ones.
Hi – I’m the research supervisor for this project (Scott is my student). I can confirm that we reused a rotor head from a 250 size heli and fixed the rotors; the linkages are totally fixed and just for fine-tuning blade pitch.
If it has no pitch control then it may have increased efficiency but will be considerably slower to change thrust due to momentum of the blade.
Triquad is a better name, Y4 already refers to a tricopter with two stacked tail rootrs, same concept as a Y6 or an X8, but not symmetrical.
or tri+1?
Looking at the Y4 and the comparison quadcoptor with the old mark one eyeball, the Y4 has more rotor area, accounting for the performance difference.
I just learned more in the comments on the subject than I thought I wanted to know. Now I want to learn more.
Can any design survive the lose of one moto in flight?
Yes. Y6 and X8 designs can.
http://www.youtube.com/watch?v=AD9juUWL5iU
I thought less blades was better?
I was sure there was a HaD article about it, but I cant find it.
More blades means more surface area means more lift. The blades are airfoils.
Collective Pitch Quad copter Stingray 500 [youtube=http://www.youtube.com/watch?v=Scj8_XEEL1A&w=560&h=315]
Has anyone built an intermeshing “eggbeater” rotor model? Look up KAMAN helicopters.
I’ve had this same layout in mind for months, but with one major difference. Replace the central electric motor with a gas engine. You get much longer flight times, and don’t need a large battery.
Someone should make a fully enclosed saucer shaped variant of this :-)
Add blinkelights, LED searchlight and car alarm/lock trigger for the real “Close Encounters” experience. Profit!!!!
http://youtu.be/LczpOBDT8F8?t=4m14s
To improve efficiency it pays to know where the losses are. e.g. if you’re moving up a hill, the power required to lift the mass of the vehicle up the hill is “power expended” and you’re never going to drop below that number.
So… flying things… What costs energy to keep things flying?
Lets start with an example: A 1kg plane that has a glide ratio of 1:10 is flying at 10m/s.
As the glide ratio is 1:10, it requires 100gf of thrust to stay in the air.
Now make that a 1kg quadcopter hovering…. It required 1kgf of thrust to stay aloft! Whoa!
The thing is, the thrust is the wrong measure: The plane is pushing that 100gf (about 1N) against 10m/s airspeed. So the power used is 1N * 10m/s = 10W.
Now the quad is pushing against the stillstanding air. but in practise after a few moments there is “new” air coming through the rotos. This increases the amount of energy required. If you manage to keep this new air moving at less than 1m/s you’re going to win over the airplane.
Next there is propellor efficiency. The larger the prop, the more efficient it is: For wings it’s called the aspect ratio. There are losses at the ends of the prop/wing. So the more length of wing/prop you have for the width of the tip, the better.
So… keeping the Y4 aloft with the bigger prop means you’re more efficient.
Improving efficiency of classical quad configurations means: bigger slender props, filling a larger area of the bounding circle with props, and not hoovering, but moving along, so you’ll encounter new air that isn’t already moving…
I am not sure if i can trust a person using a non-standard, deprecated and highly unrealiable unit ôo
What exactly was the problem with saying “a 1kg quadcopter needs to produce 1kg of lift to hover”?
Because kg is a unit of mass, which is only part of the measure of force?
Shouldn’t the outer props be outside the diameter of the main rotor for better efficiency?
Gas engine for the large rotor and a small generator to power the auxiliary rotors sounds like a nice plan.