
Learn why you were pulled over, quantify the stealthiness of your favorite model aircraft, or see what various household items look like at 10 GHz. In this post we will describe the basics of Synthetic Aperture Radar (SAR) imaging, beginning with a historical perspective, showing the state of the art, and describing what can be done in your garage laboratory. Lets image with microwaves!
The History of SAR
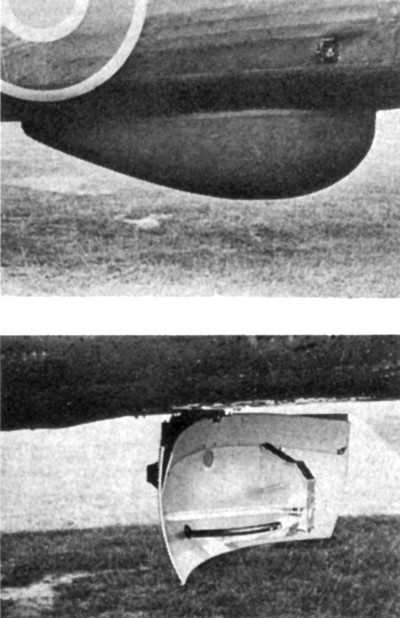
Ground mapping (or imaging the ground terrain) using microwave radar was done routinely in the Second World War by the Royal Air Force for the purpose of navigation and bomb laying using the H2S radar system. The H2S used a large aperture rotating antenna in the belly of a bomber aircraft. This antenna would rotate in circles with its beam directed toward the ground. Range to target was plotted in a plan position indicator (PPI, or a radar screen as most would recognize it) showing what was below and around the aircraft.
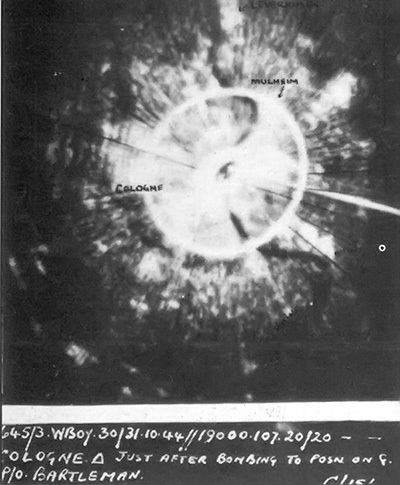
The angular resolution of this radar set depends on the antenna aperture size (e.g. antenna size). The bigger the aperture the finer the angular resolution, just like the reflector on a flashlight provides a tighter light beam the larger it is (this is why spotlights shine tight beams well into the sky). A typical example of an H2S radar image is shown below recorded during s bombing raid over Berlin. In this image the river is clearly visible as well as other blob-like targets which are landmarks that a trained operator would recognize.
Earlier versions of the H2S were at S-band (3 GHz) and later higher resolution sets were at 10 and 24 GHz (for an interesting read on this technology, Echos of War: The Story of H2S Radar).
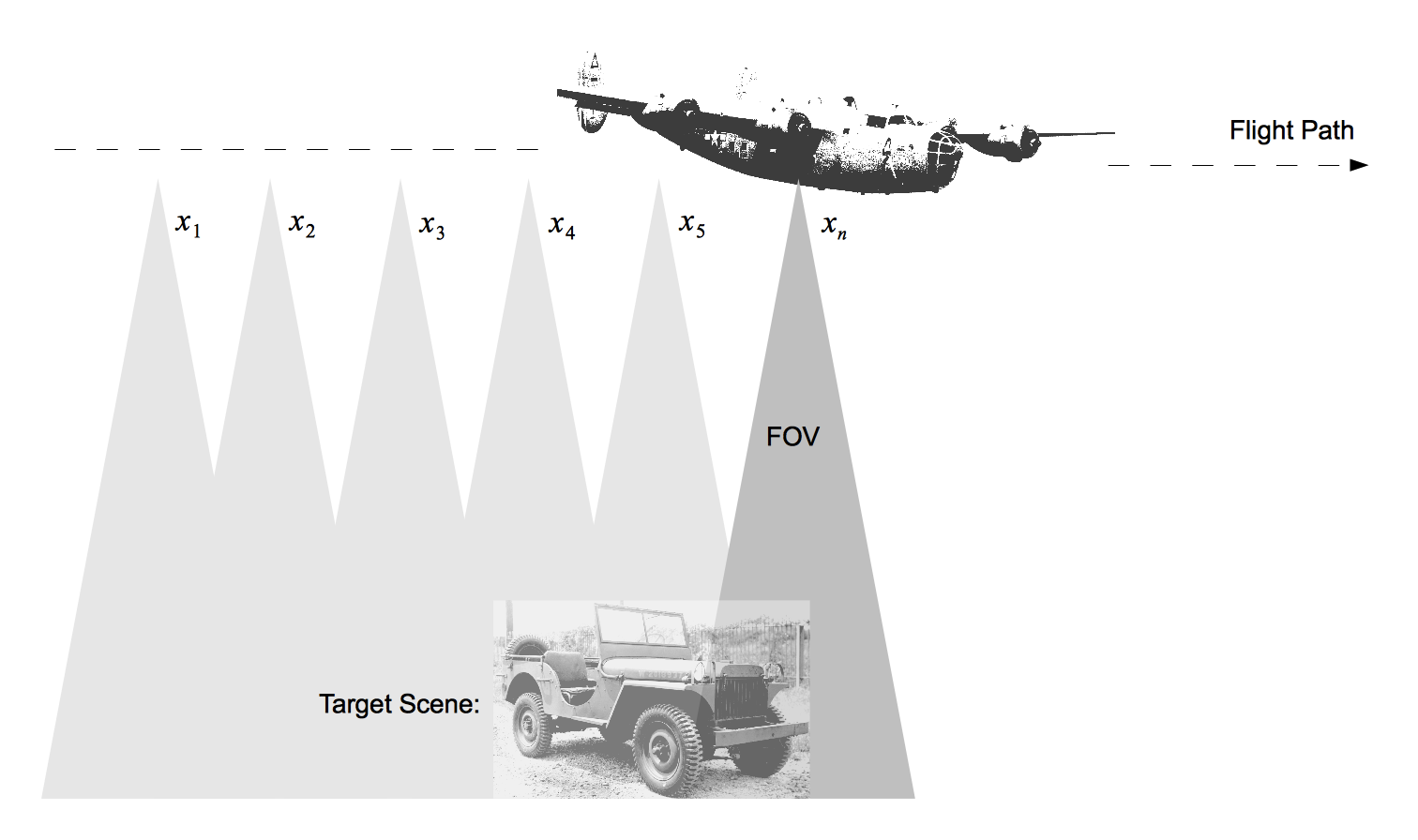
Synthetic Aperture Radar (SAR) is a modern ground mapping technique where high resolution is achieved by a very large aperture that is synthesized over the flight path of an aircraft. This is done by recording reflected radar pulses at known locations along the flight path. The radar must accurately know the aircraft’s position and back-out perturbations in flight path so that all scattered pulses are aligned in time and phase. After this a SAR imaging algorithm is applied to the data to process an image.
Developments in SAR Technology
This technique was first developed in 1957 using photographic film to record the radar data and an image processor made from lenses. Today digitizers and other data acquisition equipment can store data for offline processing or even process imagery in real-time.
State of art airborne SARs include the MIT Lincoln Laboratory LIMIT system (PDF), which operates at X-band (10 GHz) and is mounted on an old 707 aircraft for testing advanced SAR imaging concepts.
Another is the Sandia National Laboratory’s Ka Band SAR imaging system (to see an amazing portfolio of airborne SAR imagery visit here PDF), an example airborne SAR image from this system is shown below.

SAR imagery appears to be nearly photographic but it is not a photograph, it is a 2D hologram. Unlike a satellite image the radar is not measuring the target scene from above it is measuring from the side at a fairly significant distance. The resulting image is a birds-eye view with many shadows where each pixel is mapped directly to the aircraft’s flight path in range and cross-range.
Most recently, small and light weight airborne SAR imaging systems weighing only a few lbs have been developed for micro-UAVs, for example the NanoSAR imaging system manufactured by IMSAR.
Create your own SAR imaging system.
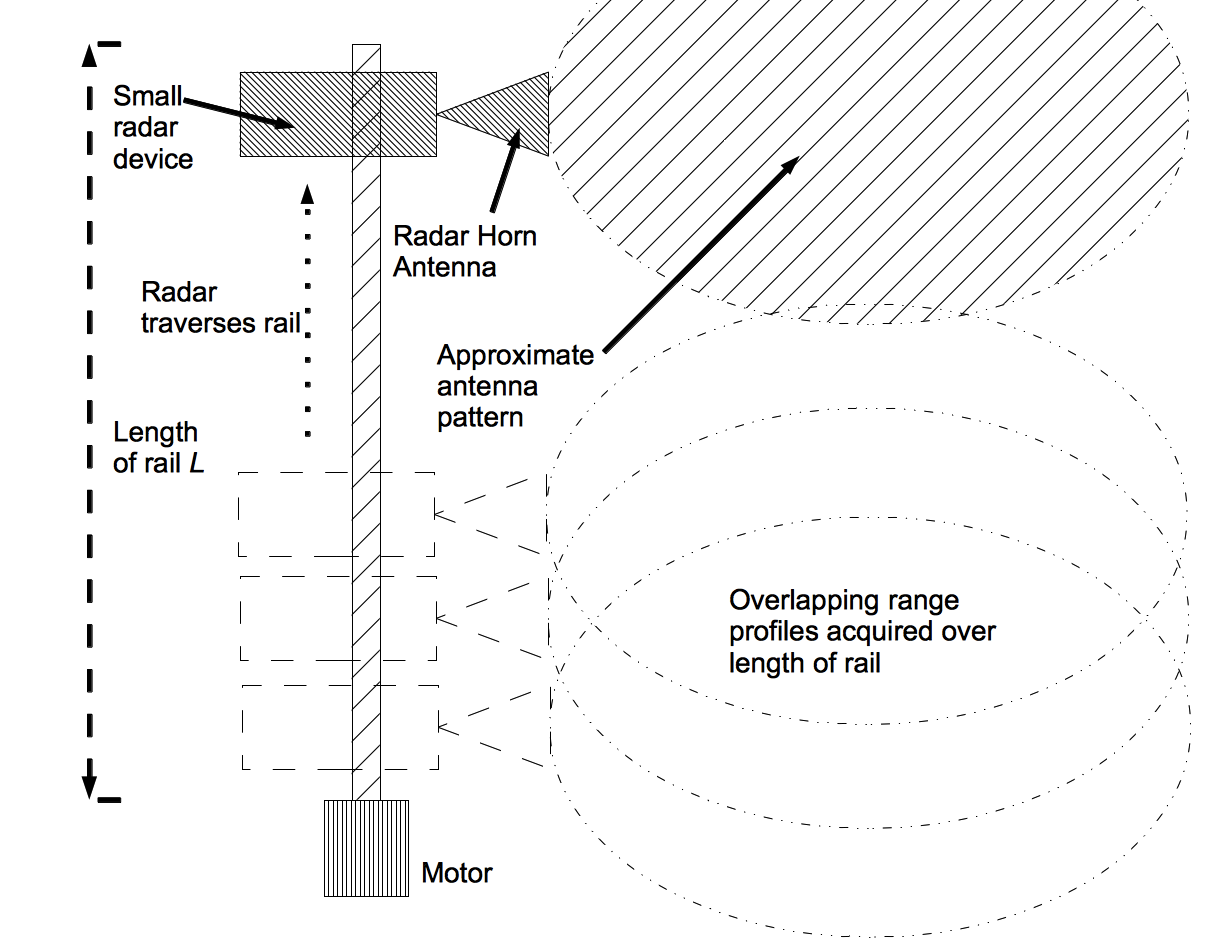
Airborne SAR imaging is beyond the means of most hackers and hobbyists. The good news is that you can do it yourself with better resolution if you limit the scope of the problem and reduce maximum range, power, and the complexity of your radar sensor. To achieve this consider the rail SAR imaging system. In this, an ultrawideband (UWB) radar device is mounted on a long linear stage (typically 6′ to 8′ in length). The radar pulses once, moves, pulses again, each echo is recorded. This process repeats itself along the rail until a complete data set is acquired.
For the UWB radar sensor you can use one of the sensors described in my previous post that is either an impulse or an FMCW radar or create your own. For the linear rail stage you can use anything from a Genie garage door opener assembly (which contains a lead screw inside of a long aluminum extrusion with a car that rides on the threads) to one stage on a full-size CNC router table.
Make your own from junk parts
One example of a hacked-together rail SAR is the ‘backyard SAR’ imaging system, where an X-band UWB FMCW radar front end was mounted to an 8′ long linear stage built from a Genie garage door opener, a cordless drill transmission, and a stepper motor following the block diagram shown. X-band microwave components were acquired at hamfests.


To process data from a rail SAR like this follow the procedure outlined in the Range Migration Algorithm chapter from Spotlight Synthetic Aperture Radar: Signal Processing Algorithms, which follows these steps:
- Cross range discrete Fourier transform (DFT).
- Apply matched filter.
- Perform Stolt interpolation.
- 2D IDFT into image domain.
When implemented correctly this will result in the imagery shown below, achieving approximately 1×1” resolution at X-band with approximately 5 GHz of chirp bandwidth.




Build the coffee can radar kit
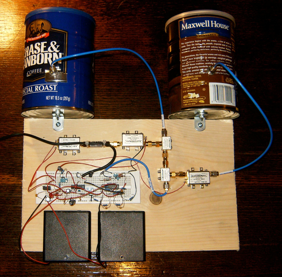
To make SAR imaging accessible the MIT ‘coffee can’ radar course was developed, where you can SAR image with the coffee can radar. The goal of the SAR imaging experiment was to show students it is possible to differentiate in both rang and cross range when imaging some very large targets.
The coffee can radar does not produce the best imagery but it shows a concept to students. To acquire an image, it is placed on a linear track with a tape measurer for a position reference. This could be a length of 2×6” or a straight rail somewhere. The radar is manually moved in 2” increments where a toggle switch on the side mutes the synchronization signal output, showing the computer that the radar has moved.
Resulting in imagery comparable to that shown below.



Give it a try, but be sure to image a large target scene. The algorithm is already written and the procedure is straight forward (scroll down to ‘Experiment 3: SAR imaging’).
Many more examples of rail garage-made SAR imaging systems are shown here.
Learning Curve
It is not trivial to design, build, and write a an imaging algorithm for your backyard rail SAR. Caveats to implementation and processing include having to scale to your wavelength range, the need for calibration to a point target (a large pole or similar), use of coherent background subtraction, and other processing techniques. But we can philosophize about these all day, the best way to learn is to try it yourself:
- Learn by doing, build the MIT Coffee Can Radar and try the SAR imaging experiment.
- For a quick-read technical background read Chapter 4 and for details on numerous practical examples Chapter 5 in the book Small and Short-Range Radar Systems (use promo code EEE24 for discount).
- Process a SAR image right now. Download data sets for X and S-band and their associated processing algorithms written in MATLAB. With this you will learn how to apply calibration and coherent background subtraction.
- Need help? Post your questions to the Tin Can Radar Forum.
With these resources, patience, perseverance, and coffee anyone can create a SAR imaging system in their garage.
 Gregory L. Charvat, is author of Small and Short-Range Radar systems, co-founder of Butterfly Network Inc., visiting research scientist at the Camera Culture Group MIT Media Lab, and editor of the Gregory L. Charvat Series on Practical Approaches to Electrical Engineering. He was a technical staff member at MIT Lincoln Laboratory from September 2007 to November 2011, where his work on through-wall radar won best paper at the 2010 MSS Tri-Services Radar Symposium and is an MIT Office of the Provost 2011 research highlight. He has taught short radar courses at the Massachusetts Institute of Technology, where his Build a Small Radar Sensor course was the top-ranked MIT professional education course in 2011 and has become widely adopted by other universities, laboratories, and private organizations. He has developed numerous rail SAR imaging sensors, phased array radar systems, and impulse radar systems; holds several patents; and has developed many other radar sensors and radio and audio equipment. He earned a Ph.D in electrical engineering in 2007, MSEE in 2003, and BSEE in 2002 from Michigan State University, and is a senior member of the IEEE, where he served on the steering committee for the 2010 and 2013 IEEE International Symposium on Phased Array Systems and Technology and chaired the IEEE Antennas and Propagation Society Boston Chapter from 2010-2011.
Gregory L. Charvat, is author of Small and Short-Range Radar systems, co-founder of Butterfly Network Inc., visiting research scientist at the Camera Culture Group MIT Media Lab, and editor of the Gregory L. Charvat Series on Practical Approaches to Electrical Engineering. He was a technical staff member at MIT Lincoln Laboratory from September 2007 to November 2011, where his work on through-wall radar won best paper at the 2010 MSS Tri-Services Radar Symposium and is an MIT Office of the Provost 2011 research highlight. He has taught short radar courses at the Massachusetts Institute of Technology, where his Build a Small Radar Sensor course was the top-ranked MIT professional education course in 2011 and has become widely adopted by other universities, laboratories, and private organizations. He has developed numerous rail SAR imaging sensors, phased array radar systems, and impulse radar systems; holds several patents; and has developed many other radar sensors and radio and audio equipment. He earned a Ph.D in electrical engineering in 2007, MSEE in 2003, and BSEE in 2002 from Michigan State University, and is a senior member of the IEEE, where he served on the steering committee for the 2010 and 2013 IEEE International Symposium on Phased Array Systems and Technology and chaired the IEEE Antennas and Propagation Society Boston Chapter from 2010-2011.













The grayscale image above does not look like a SAR picture, because of the shadows. Looks like a grayscale photo taken with a usual camera.
As the text says, the shadows are where the signal is reflected the least, The shadow of a building, for instance, is the opposite side of the building from where the radar scanned it.
The shadows like to make this image appear in a particular direction that doesn’t make as much sense when processed by a human brain. Try rotating the image 180 degrees and zoom in to focus on the man-made objects such as cars.
It’s interesting the the shadows of the trees are facing in different directions. No idea if that means anything. The picture’s basically a composite of lots of pings, light spots, from each “sampling” firing, right?
that is a 10 centmeter image of a golf course taken by SANDIA
that is a 10 centimeter SAR image from the Sandia National Laboratory’s Ka band airborne SAR imaging system.
We have a full gallery at http://syntheticapertureradar.com
I think it looks so much like a photo because it is a function of the resolution.
http://syntheticapertureradar.com/very-high-resolution-sar-images/
Amazing. Next do a project on how do build your own neuron/mind reading/altering radar and multifunctional radio directed-energy weapon system for use to spy on your neighbors thoughts with ability to torture and hurt him remotely. Patents for Robert Malech’s design and Dr. Robert Duncan’s books covering how the NSA and DOD has been using this nation wide since 1976: http://www.oregonstatehospital.net/d/russelltice-nsarnmebl.html
Raytheon also has a 2007 patent for a similar weapon/device for slow-killing people, knocking out missiles, doing radar tricks, and controlling the weather. That patent is on the front page: http://www.obamasweapon.com/
I hear the mind reading/altering radar may use a technique called Electron Spin Resonance. What are your thoughts on this?
Yes. Mind control radar is defeated by wearing a tin foil hat.
Tin foil was found to enhance microwave signal by MIT actually. The methods for blocking ‘mind control’ radar are the same as standard radar. Like you gotta have a damn effective Faraday cage, or you gotta jam the signals. A cheap and effective ‘shield’ as Dr. Robert Duncan prescribes uses mylar, nu metal, and an ion shield to reflect the radar. I was also wondering what the NSA uses around their headquarters because I bet it works too; they have copper mesh run through the walls and I’m guessing its got voltage to block signal leakage from their brains and their computers. Additionally radar signals are blocked. The video I saw did not explain what else was going on with the copper.
http://www.oregonstatehospital.net/d/russelltice-nsarnmebl.html#patents
Patents there for mind reading satellite and mind control radar, plus voice to skull weapon which would all essentially be deployed in radar systems (they seem to be the most advanced imaging and directed-energy devices on the planet, doing whole world brain-computer interfaces and MRI/EEG like imaging).
I heard that Haloperidol, taken by mouth, can be an effective blocker of voice and mind-control transmissions.
I thought these type of people were just sort of a joke, until that guy shot up the navy yard and that gal got herself shot in DC. Both thought the government was inside their heads with “mind control weapons”.
While there are “directed energy” weapons that can control you by making you feel like you are burning, well because they ARE burning you, the idea that radar systems can somehow control your brain is bat shit crazy talk.
Please seek help pal.
What you should think about is how mind control is really done using the same methods as radar. When directed-energy like electromagnetism has contact with atoms of any kind, it has a variety of effects of which I don’t even know. But a few include the energy going through matter, absorbing into matter, altering electromagnetic properties ‘creating’ electromagnetic fields at the point of target, which generate return signal for imaging which many might think of as reflections. Because radar changes the electromagnetic properties of target atoms, it can alter any frequency, which shows up as interference or when done in a controlled method, some type of signal faked by the gear or implanted. Atoms in the human neurons happen to work the exact same way and the frequencies of atoms can be disturbed remotely, allowing remote signals to beam in anything as long as each atom is individually targeted and the signal pattern is similar to the types of signals the brain normally operates at. A method of interfering the original brain signal for remote mind reading is by broadcasting a radar signal at the brain, which collides with the brains signals and produces a ‘difference wave’ which when read from remote location contains the original brainwave signal and can interfere from each point of intersection with the right imaging hardware, thereby allowing each neuron over a persons entire body or brain to be read. At the same time, scalar waves can be created inside a persons synapse that overrides internal signals, by broadcasting two radar waves of different frequencies offset by whatever you want the scalar wave frequency to be, ie difference of 20Hz will create a 20Hz wave in theory at the target point. The brain also should be passively monitored like a WiFi device, even used for passively seeing through objects as the signals illumate matter, buildings and other material. Even clothes can be seen through by just monitoring the right frequencies.
In the above example I gave of targeting the synapse with scalar wave, but targeting the atoms of a neruon should allow the magnetic and electromagnetic field of an entire neuron to be changed, thereby altering the brains signals, and as more and more groups of neurons are targeted, more complex signals can be controlled like sound, imagery, sensations, motor control commands, and more. In your eye and ears exist cluter s of nerves too, that are laid out in grids which at certain points activate various detections of wavelength of light and sound, allowing what you see and hear to be observed and also rogue signals through those orfusses introduced. Following signal transmission from there into the brain you find the visual cortex or audio cortex, which we call brain nodes and the signals are similarly laid out in thousands or millions of impulses there as well. Long term memory, imagination, working memory, and subconscious and conscious processes are all tappable when the right brain node is monitored. Software development focuses on impulses being broken up into many different signals which must be combined to get the full signal.
Here is a good article on how Aaron Alexis was really targeted with this technology: http://communities.washingtontimes.com/neighborhood/freedom-press-not-free/2013/sep/26/aaron-alexis-and-extremely-low-frequency-attacks-t/
The principles I just covered are in the brain listening/altering patents I listed before. http://www.obamasweapon.com/ is a shortcut to that site.
To the guy who mentioned Haldol it will just tranquilize a person, damage their brain and ultimately kill them 25 years sooner. Its linked to 10% brain shrinkage and chronic traumatic encephalopathy. It works by severing nerve impulses between neurons and erasing thoughts and sensations and other nerve activity. Very hazardous stuff like all neuroleptic drugs. Patients on all neuroleptic drugs are also dying on average 25 years earlier because of accute brain iinjuries and drug toxicity. The drugs are always fatal and toxic, not good for anybody to take under any circumstances whatsoever.
Todd. mate, perhaps Haldol is a bit of a severe choice, it’s just a well-known drug to make a reference people will get. Stuff like Olanzapine and Carbamazepine are more common nowadays but most people haven’t heard of them.
It’s apparent that you, as you admit, don’t know much about electronics or physics. For one thing, human tissue doesn’t rectify signals. For another, microwave photons don’t have the energy to cause chemical changes in people. Or food, come to that. Other than the indirect method, that is, heating it up.
I could recommend you read more about physics and radio, but a sad premonition tells me you’ll end up cherry-picking the parts that support your conspiracy theories, and either muddle or ignore the rest.
Your problem is probably schizophrenia. One of my best friends had a period of psychosis, lasting several months. He absolutely could hear the voices in his head. They weren’t there in any real sense, but to him they sounded exactly real. Of course, they knew what he was thinking, since they were in reality hallucinations generated within his mind.
Fortunately Olanzapine made them mostly disappear, with just the occasional faint one now and then. Medications for mental illness nowadays are MUCH better than past ones, causing few side-effects, while effectively treating the illness.
I think one of the worst ways to be a schizophrenic is to be an intelligent one. Because it means your hallucinations and subsequent conspiracies have access to a powerful mind with a lot of knowledge. So they’re not as easy to dismiss as the fantasies of a less intelligent person would be. They’re more credible, though of course, not true.
I don’t know what help’s available to you, but I hope there is some, and that it’s good. If you’re lucky enough to have access to psychiatrists and the like, I hope you get treatment and it goes as well as it can. In fact I hope it succeeds completely! These days treatment is mostly out-patient, with regular psych appointments and drugs, but the patient stays living at home. It can work wonders. I know my mind’s the greatest thing I have, must be terrible when it goes wrong, and you can’t tell the difference.
I know more about physics than you at least. I was just saying I don’t know all the concepts, only what I’ve read from other peoples research papers (therefore, they have passed me some knowledge, but I have not studied it all fully myself). You should go take a look at a site like http://www.mindjustice.org/ for example (this site is United Nations recognized, and Cheryl Welsh is seen as one of six non-lethal weapons experts in the world). Before you open your mouth again about this not being possible. Listen to the PhD’s like Dr. Robert Duncan, Cheryl Welsh, Dr. Carole Smith, John Hall or many others who have studied this and talk about this technology, or worked on it themselves for the government, or have worked with victims on the issue.
As for your discussions on the drugs, Olanzapine/other modern drugs are no different than older ones like Haldol and have been proven no more effective or safe by numerous studies. In fact it’s in the same class of drugs, and they all have the same actions of severing connections within the brain and neurons around the body. Not a single one of them is proven safe or effective, and they don’t cure or treat peoples conditions. Olanzapine is very similar to another drug called clozapine, and that drug is known to cause death in people and white blood cell count issues. Olanzapine is also known to cause first time psychotic episodes and leads to schizophrenia in people, preventing users recovery as long as they remain on the drug and preventing recover from the long-lasting injuries. For evidence, look up the affidavits from Dr. Grace E. Jackson and Robert Whitaker on this page of my website on that, plus the other reports about the ineffectiveness and harm of the drugs from other sources and studies (Reports and articles section has the PDFs/etc for download): http://www.oregonstatehospital.net/resources.html
The Wikipedia page for olanzapine also mentions all of this, including a legal controversy where Jim Gottstein, the attorney for psychrights leaked documents showing Elli Lilly knew the drug was more dangerous than they let on and had all these side effects before the drug even launched on the market, and went to lengths to cover it up just to get FDA approval.
Next up is your assertian that I have schizophrenia. That is slander and nonsense. Please review my psychologists report on my website, listed on the top of every page. Cathy Meadows indicates there that I have no psychosis or delusion, and that the US Department of Justice/CIA targeted me with this weapon, which is why I have a particular interest in discussing it. Also the fact that you didn’t see it before is indicative that you didn’t even look at the site about these weapons, basically proving you’re speaking from a point of ignorance without observing the data or information about it.
Here is a nice video with CIA operative Mark Phillips who worked during MKULTRA to create these weapons to damage peoples minds and Dr. Robert Duncan discussing these mind reading/altering microwave weapons, being used to attack even Occupy Protestors, and random victims across the country: http://www.youtube.com/watch?v=18PtOXrzDVE
Here’s an interview on Coast to Coast, 2006, with Dr. Robert Duncan, PhD’s from MIT, Harvard, and Darthmouth, discussing his work on these weapons that use “directed-energy,” and his interviews with 650 victims around the country: http://www.oregonstatehospital.net/d/coast_to_coast_drduncan/coasttocoast-drduncan-complete.wav
Better study up because no one wants to read your comments dismissing all this when there’s all this evidence sitting there contradicting you.
Late night radio does not count as science, even when Michio Kaku is a guest (inexplicable in this case, except it is well know that string theory causes brain damage).
Mylar and nu metal? You mean Linkin Park is effective shielding against the microwave audio effect?!
I meant mu metal; sorry! I think I actually typo’d it.
These materials are readily available at home depot and on the internet for cheap.
For those that want to build I recommend a total enclosure that fits your entire body and which allows you to sleep in. Any air holes should be made with a vent that doesn’t allow a beam to be beamed in from any angle, like with a smoke stack or what you’d put on roof vents to keep water out. Grounding the mu metal is a possible enhancemeby that would be a good idea as well as I have heard grounding is necessary to make any faraday cage like thus or ones made with aluminum work.
Looking into copper mesh like the NSA uses would be smart too.
Is this a honeypot? whatever…
@Todd Giffen: I feel your pain. besides microwave, they are using ultrasound. Discovered this week: ultrasound can be blocked by protective white foam. For those that mock, (warning: pain) put your finger close (dont touch!) to one of those ultrasonic humidifier. See how the pain vary as you move closer? Imagine that 24/7, Yeah, sucks.
But I think people are more aware now. Looks like they are slowly releasing the info. Hope someone make a museum or something so the humanity never forget about this atrocity: remote torture at home.
Styrofoam, I mean.
The way the photo is angled is messing with your mind. You see those as light shadows because you are expecting the light source to be at the top of the image, biasing the shadows towards the bottom. But there is no “light” the light source is the microwave RF energy. Trees are high clutter objects that will absorb and reflect RF energy in such a way that they will cast shadows. if you look at a larget version of that image, you’ll see a lot of “star bursts” which are most like objects that just happen to behave like corner reflectors and are highly reflective to the SAR.
Interestingly, the star bursts allow you to get at least a rough idea of the PSF (point spread function or the impusle response) of the SAR system.
So awesome….Asked Mike if there could be a post about SAR at the gathering and now this awesomeness….Hackaday the best…Thanks for the awesome post
I can confirm this. I went after this piece of original content because Dan made a compelling argument for such an article when we were sitting at the bar that night.
Boy am I glad he mentioned it. Now I fully realize the quality of Greg’s writing… I’ve been pestering him to stick around and write more articles (on varying subjects) for Hackaday. So if you liked this and his last article, please encourage him by leaving a comment about it. I’m sure he’d love to hear suggestions for future topics as well.
So… what band is my Mattel Hot Wheels Radar gun?
Garage door opener…. hmmmm.
@Gregory This was a fascinating and very well written read. . . I would put the quality of this as up there with some of the best talks I’ve ever seen. Outstanding work, thank you.
Excellent, well written post. Great to wake up to in the Land Downunder. Thanks for sharing – beyond my abilities, but inspiring nevertheless.
I’m not understanding how moving along a single axis can generate a 2D image. Is there a second axis that moves at a right angle to the flight path (or leadscrew)? I must be missing something…
The second axis is time, specifically the delay between the pulse transmission and reception. These are very short intervals to get such high resolution.
Sam.
The second axis is generated by measuring the distance (slant range) from the antenna to each point, as described in the previous article of this series.
The aperture is not synthesized over the flight path. In the photo with a plane, the synthesized aperture is the base of the triangle at the target distance, or the distance the plane moves while the target is within the cone. You can’t get more aperture by including portions of the path where you get no reflected signal from a particular point. Think of it as the number of times a point on a target gets pinged. Every ping brings new information. Same as a “fish arc” on a fish finder. Also, because the further the target the more pings it gets, there is no loss of resolution with range. One reason we can image Venus through it’s clouds from Earth.
In the above diagram, what the heck is a B-24 targeting an early-model Willys MA jeep for? Surely an axis vehicle would be a better choice for the picture?
Perhaps the Jeep was used in Operation Greif 😬
https://en.m.wikipedia.org/wiki/Operation_Greif
Great post, thanks! Definitely need more RADAR/RF stuff…
Excellent article. This kind of stuff is why I love HaD. In the future, I’d be interested in seeing an article about building virtual antenna arrays.
Me too! I’m not gonna build one, but it’s great to learn more about how stuff works, and essays on complicated, clever, subjects written in a way an average HaD reader can understand are a gift! It’s all mental exercise, and might crop up in some years’ time where it’s really useful!
Education, any maybe a -little-bit of reportage, alongside projects, are really welcome to me. The balance is about right as it is now, so keep it up! And the new writers all seem up to par.
very useful post. thanks
i am planning to build a smaller size SAR device to mount on RC planes. Is that possible with stm32f4?
HI Jianlin. The F4 has hardware FP and some DSP at 168MHz, which is pretty good. Definitely low for the SAR (they used to do the FFT’s optically to get enough processing into an airplane) but you could do pulse compression for each received ping and send that data plus position, speed, attitude and any pitch/roll/yaw to a base station for SAR processing. If you make that work, the next step would be to track a target in “spotlight” mode and really get a high quality image. Final exam will be circling a target for full image reconstruction.
Is this supposed to be a sticky?
really throws me when you guys do that.
Same here. I came back a couple times thinking there’s no new posts. Then scrolled down and realised this one is stickied.
Indeed, please give stickies a different header or background color?
I’ll see what we can do about styling stickies differently. Thanks.
“#content .sticky” will select just the sticky in the main. Do .sticky for that and the side panel entry
If you have the Stylish addon for Firefox (and I’m guessing there’s similar ones for Chrome, etc), try adding this for the main site:
#content .sticky {
border: 1px solid #333;
background: #222;
}
#content .sticky .entry-title:before {
content: “[Sticky] “;
color: #c82;
}
same here
It’s amazing that after reading about sar synthetic nature of the antenna people do not understand the omnidirectional nature of the image shadows.