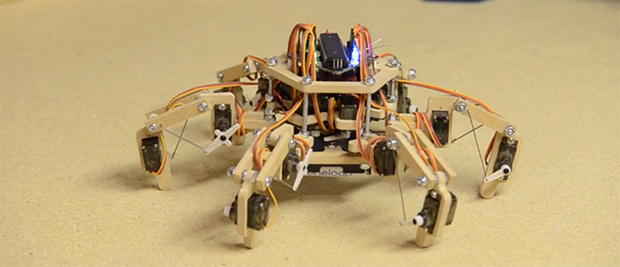
A while back, we had a sci-fi contest on Hackaday.io. Inspired by the replicators in Stargate SG-1, [The Big One] and a few other folk decided a remote-controlled hexapod would be a great build. The contest is long over, but that doesn’t mean development stopped. Now Stubby, the replicator-inspired hexapod is complete and he looks awesome.
The first two versions suffered from underpowered servos and complex mechanics. Third time’s the charm, and version three is a lightweight robot with pretty simple mechanics able to translate and rotate along the XYZ axes. Stubby only weights about 600 grams, batteries included, so he’s surprisingly nimble as well.
The frame of the hexapod is designed to be cut with a scroll saw, much to the chagrin of anyone without a CNC machine. There are three 9g servos per leg, all controlled with a custom board featuring an ATMega1284p and an XBee interface to an old Playstation controller.
Video of Stubby below, and of course all the sources and files are available on the project site.














I LOVE my scroll saw!
I’d love my CNC much more if I had a CNC though……..
And I just had a great Idea, I need to make a replicator to sit on my desk, an animation one that moves its wings occasionally.
If I had the funds to make one I’d immediately code it to run/gallop properly… That’s something I’ve never seen a hexapod do and I know they’re fully capable…
well, these look like standard servo motors, and galloping is typically done with less legs. You’ll need servoes with at least double the speed, and double the torque. Making this guy cost approximately THE SAME, if you buy them all on hobbyking: http://www.hobbyking.com/hobbyking/store/__23921__Corona_DS_319HV_Digital_Metal_Gear_Servo_4_2kg_34g_0_05s.html
That servo is likely 3x faster than the one pictured above, this will allow movements to be fast enough to gallop. Gallops though, are usually using less feet, so this means you might need 2-6x the amount of torque vs whatever the servo’s above do at top speed.
I love the idea though, while you are at it, add some retracting feet: http://www.hobbyking.com/hobbyking/store/__17539__Twist_and_Turn_Electric_Retract_with_3mm_Landing_Gear_Leg_2pc_29_0g.html
The servos I am using for this build are way too small / weak to gallop… even with such a small robot, walking is pushing the bounds of possibility. I agree it would be awesome to do a full running robot, but the cost of servos makes it out of my reach for the time being.
Cheers
Awesome build, can’t wait to take a peek at the source. How were you getting that many PWM signals out of a 1284p, in software with a timer interrupt?
There shouldn’t be any problem doing this, I don’t think – I mean, the Arduino Servo library can do it. He explains the PWM timer process on his site – but there isn’t any source code unfortunately. He references a git repo for the source code, but the repo he refers to looks empty (?)…
The git repo is there, I just don’t have a web interface for it. From the command line, “git clone http://git.digitalcave.ca/projects.git” will get you everything for Stubby (and all of my other projects too).
(Yeah, I suppose I should look at getting a git web interface… any suggestions on a good one, preferably residing in a Debian package for simplicity?)
Cheers
Gitweb is easy to set up, and it’s in wheezy. It’s written in perl though, so it’s not the best solution if You’ve got a slow-ish server.
I’d try cgit (http://git.zx2c4.com/cgit/), though You have to compile it from source.
gitblit is also quite good. Self contained java servlet so easy to install.
Cool, thanks to you both. I have just installed gitweb and it appears to work fine for my purposes. You can now browse Stubby files at http://git.digitalcave.ca/gitweb/?p=projects.git;a=tree;f=projects/stubby;h=e0048350bb392f963f381be8157f0dbb323d78ae;hb=HEAD
Cheers
Yeah, I use timer1 with the two compare values: COMPA for the period (turns on all the pins at the beginning of every waveform cycle) and COMPB for the phase (tuns off each pin in turn).
Cheers
It says everything is cut with a scrollsaw. I can only find one picture with the components on it. Is there anywhere with individual component pictures so one can print them on a standard printer for scrollsaw templates.
The Hack Projects page for this looks like it has an A4 page of part outlines to print.
On the hackaday page in main pictures I have a US letter sheet with all components: I used that to cut everything. Even better, for a PDF go to http://stubby.digitalcave.ca/stubby/img/frame.pdf
Cheers
Oh, and while on this topic: the printout works very well with a scroll saw, as the kerf (the width of the blade) is pretty much identical to the width of the printed lines, so if you just follow the lines you get perfectly cut parts. A #3 blade (which I used) is small enough to rotate within the kerf, so you can get 90 degree (or even less) cuts without needing to allow for tooling width.
Cheers
I have a .dxf file in the repo (projects/stubby/frame/frame_3dof_radial.dxf) (the output of this is what I have shown on the website / PDF on my site). Each part is an object, and you can move them around as desired.
Cheers
chagrin? “You Keep Using That Word, I Do Not Think It Means What You Think It Means”
That marks the fourth Princess Bride reference in three days, for me. I think it’s time to rewatch the movie.
That said, I do believe you’re right. HAD-editors: You mean the exact opposite of ‘chagrin’ here. ‘Delight’ might be a good word.
Yes. See http://www.thefreedictionary.com/chagrin
“cha·grin (sh-grn)
n.
A keen feeling of mental unease, as of annoyance or embarrassment, caused by failure, disappointment, or a disconcerting event: To her chagrin, the party ended just as she arrived.”
Came here to say exactly that, thx.
Dunno you guys. Seems like they were taking a stab at the CNC crowd, i.e: ‘All you peeps with cnc machines, you thought you were cool until this guy came up with something awesome that doesn’t need one to be cut out’. I, for one, welcome a cool project that doesn’t require me to spend big $$ on a cnc machine just to build the pieces. I have dreams of building one about 2-3x the size with different materials and beefier servos, to terrorize the local fauna (read cats), and various RC vehicles that dare to show their chassis around my neck of the woods… Muhahahaha…
FYI I have installed a web interface to my git repos… you can browse code online at http://git.digitalcave.ca/gitweb/?p=projects.git;a=summary
Cheers
Love this