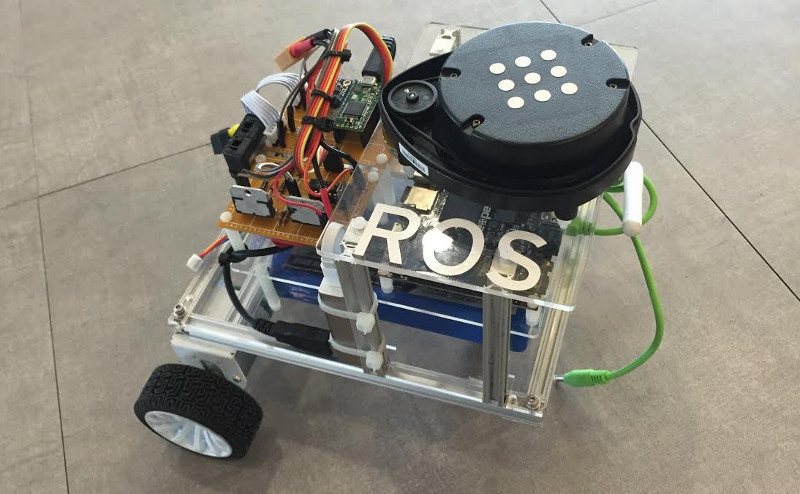
The Robot Operating System (ROS) is typically associated with big robots but [Grassjelly] decided to prove differently by creating Linorobot. This small, differential drive robot is similar in appearance to many small Arduino based robots often used for line following. Linorobot packs a lot more computing power with a Teensy 3.1 connected to a Radxa Rock Pro. The Teensy handles the motors, reading their encoders, and acquisition of IMU data.
The Radxa, new to us here at Hackaday, is a single board computer based on the quad-core ARM Cortex-A9 1.6 GHz CPU. It may not have been seen on our pages but if you’re at Hackaday Belgrade you can attend a session on building a cluster using it. The ability to run Linux is key to using ROS, which is an open source system for controlling robots. With the Radxa running ROS it interfaces directly to the Neato XV-11 Lidar’s dedicated controller board.


The Linorobot packs into a small robot the capabilities usually seen in much larger and expensive robots such as the Turtlebot 2. With this diminutive robot hackers can learn about doing SLAM (Simultaneous Localization and Mapping) and autonomous navigation, plus the other capabilities of ROS.
[Grassjelly] has a tutorial on building the robot which is also a good introduce to ROS. He provides the software as open source. It’s an impressive project which provides a small, comparatively affordable robot for learning and working with ROS. A video of Linorobot SLAMing and navigating [Grassjelly’s] lab is after the break.














sweet collection of 3d printed hands! ;)
Yeah, they’re OK.
How about a couple quick resources, and some proper recognition…
The ROS page here : http://wiki.ros.org/ROS/Installation has a section for pre-made supported robots.
There is one called the “GoThere” which looks surprisingly like the one in the video… http://wiki.ros.org/Robots/gothere
It’s been made… it’s small… and uses ROS.
This isn’t something ‘new’, groundbreaking or unique. It’s looks like a DIY clone of an existing robot.
http://www.saisentan.co.jp/2015/08/ros_slam_gothere_robot/
Nothing against the team who made this one… but the article should reflect a do it yourself theme instead.
Props on the build by the way.
Give that bot a hand!
+1