
In the show Full Metal Alchemist, there’s a city called Rush Valley whose main and only business are the high performance prostheses called Automail. Engineers roam the street in Rush Valley; the best have their own shop like that of the high-end clothiers in Saville Row. Of course; it’s all fantasy set in a slightly ridiculous Japanese cartoon, but while walking through this year’s Maker Faire I began to wonder if is a future that may come to be.
The problem with prosthetics is the sheer variety of injuries, body types, and solutions needed. If an injury is an inch higher or an inch lower it can have a big effect on how a prosthetic will interact with the limb. If the skin is damaged or the nerves no longer function a different type of prosthesis will be needed. Some prostheses are to replace a lost limb, others are to assist an ailing body in order to return it to normal function. More than a few are simply temporary aides to help the body along in its healing efforts. Unfortunately, this means that it’s often the case that larger companies only sell the prostheses people are most likely to need; the rarer cases are often left without a solution.

However, we see hackers stepping up and not just working on the problems, but solving them. One of our semifinalists last year, openbionics, inspired one of the projects we’ll be talking about later. There are robotic legs. We met a guy at MRRF who has been 3D printing hands for his son from the E-nable project.
Along these lines, we saw two really cool projects at Maker Faire this year: The first is the Motor-Assistive Glove, or MAG. MAG is designed to help people with Peripheral Neropathy regain some use of their hands while they go through the lengthy road to recovery. Perhipheral Neuropathy is a disease, usually resulting from diabetes, toxin exposure, or infection, where the nerves are damaged in such a way that typically the hands and feet are no longer mobile or feel sensation in a useful way. Once the disease is in full swing, a previously able person will find themselves unable to do simple things like hold a can of soda or grasp a doorknob firmly enough to open it.

We had a chance to interview one of the members of the MAG team, [Victor Ardulov], which you can see in the following video. [Victor] and his group started a research project at the University of Santa Cruz to develop the Motor-Assistive Glove. The concept behind it is simple. People with Peripheral Neuropathy typically have some movement in their hands, but no strength. The MAG has some pressure sensors at the tips of the fingers. When the user puts pressure on the pad; the glove closes that finger. When the pressure is off; the glove opens. The concept is simple, but the path to something usable is a long one.
They overcame numerous obstacles in the design of the glove, many of them non-obvious. For example, if you’d like something to retract an extended finger, a spring would likely be your first choice. However, coil springs only care about displacement along their axis, they offer considerably less resistive force if bent. So, elastic bands proved a better solution. Do you glue the 3D printed parts to the glove, or do you sew them? Why do the pressure pads with the longer leads keep failing? These and many more were all questions that had to be answered by the team.

The brains of the device is a custom motor controller shield sitting on an Arduino. While the Arduino has its fault, it remains as always, the champion of accessibility. The actuators are small geared brushed motors. What appears to be a worm gear is actually a spool for a metal cable. When the user presses on the pads in the fingers, the motors turns and pulls the cable down, contracting the finger. To extend, the motor reverses and lets cable back out and the finger returns to its resting state via the elastic bands on the back of the hand.
The team is hoping to get the glove to a state where another project; perhaps one like e-Nable, can get the hands into the lives of the people who need them. If you’d like to contribute or check on their progress, their site is here.
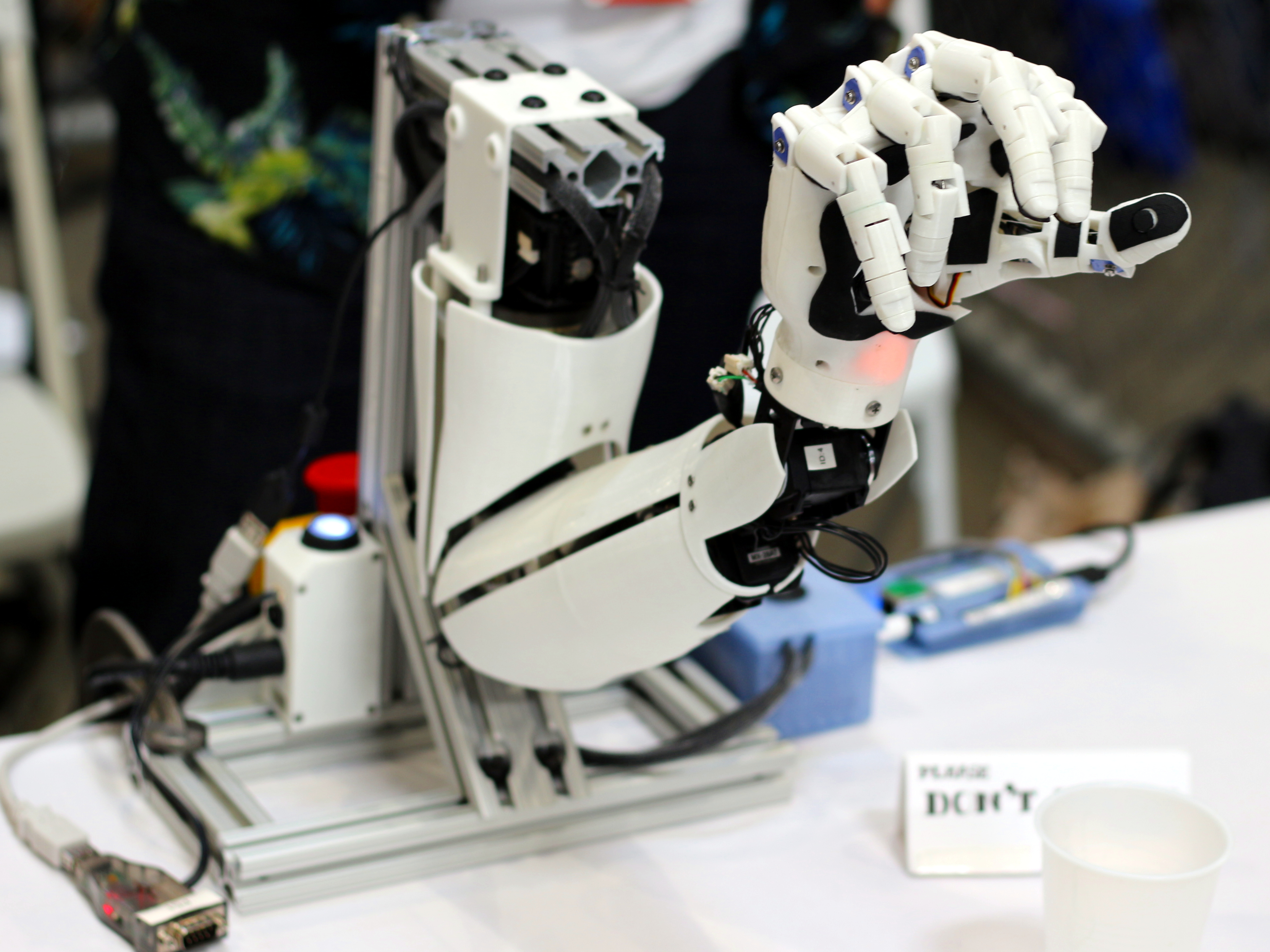
Closer to the Automail side of things, is the other project we got to see at Maker Faire, the Bento-Arm. The Bento arm is a research project grown out of BLINC Lab at the University of Alberta. Unlike the MAG, the Bento Arm is still a long way from holding a can of soda; proudly attached to someone’s shoulder. Its purpose is to lower the barrier to those wishing to experiment with advanced myoelectric prostheses. The Bento Arm includes 5 degrees of freedom (shoulder rotation, elbow flexion, wrist rotation, wrist flexion, hand open/close). It’s also anatomically correct.
Even if you could have a perfectly functioning arm today: one that could flawlessly detect electric signals and translate it into super smooth, super strong movement, It would at best be mildly useful, and at worse manage to be more a hazard to its user than a boon.
Luckily, we live in a world with self-driving cars and five dollar single chip computers. It’s not such a stretch to say that we have all the components for a perfect prosthesis lying around; all it needs is a little bit of robotic glue to hold it all together. Of course, that will take tons of research at the edge of machine learning, human machine interaction, and all the related fields.
The Bento Arm is not a cheap arm, but considering that a low-end myoelectric arm can cost over 50,000 US Dollars… well, it’s a cheap arm. The actuators are off-the-shelf Dynamixel brand servos. These high-end servos come stock with position control, sensors for velocity and load, as well as a grab bag of useful modes. Want them to act as a shock absorber? They can do that.
The frame for the arm is 3D printed. It’s all been designed so that it can still go together even with the tolerances that a normal RepRap style printer can meet. The control software has been written for both ROS (Robot Operating System) and MatLab; If you’ve ever spent any time around Mechanical Engineering professors, you know they get nervous without MatLab.


Certainly as cool as the Arm is their Handi Hand, slated for open source release later this year. It attaches to the Bento Arm; after which the whole assembly starts to look pretty futuristic. The Handi hand has motion in all five fingers, positional feedback, and even a camera in its palm. Which makes you wonder about the monster in Pan’s Labrynth.
Since it’s just servos all the way down, the hand can be controlled with any microcontroller that outputs a PWM signal in the 0-5V range. Their current library is written for the Arduino Mega, but this can be easily ported.
In the end the project all comes together to make an impressive machine learning platform. For the price of a top of the line quad-copter and a few late nights, any hacker or university can be working on the next generation robotic arm. That’s pretty cool. If you’d like to get in touch with the project, the link is here. If you’d like to build a Bento Arm, they’ve already released the entire design on GitHub; It even has an assembly manual!
In the end it comes down to this. The continued work of scientists, doctors, and engineers around the world along with advances in home rapid prototyping have brought the field of prosthetics not just into the hands of Hackers, but into the lives of regular people through them. It’s clearly showing itself to be a field where anyone can get active in it and start helping right away. Whether you’re just signing up on e-Nable to start printing the parts for hand during the hours your printer would otherwise sit idle, or if you’re building on the work done by people like Blinc and MAG to get closer to building hands as nice as the ones the Skywalker family likes to get after fights, this is an exciting time to be a Hacker.














A fully articulated arm is definitely on my //TODO: list.
Ed…Ward… Ed…Ward
I have no doubt there is a future in prosthetics for DIY oriented individuals, but I wouldn’t go as far to say the hacker is the future of the prosthetic. The term hacker will be carrying cumbersome baggage for some time yet, even DIY has baggage. I regards to the featured product, how does provide feed back to the owner’s brain? I’m a stroke survivor. Without feed back as to hard I was grasping something, I wouldn’t have been able to retrain my brain to use my affected hand. Even after 22 years it takes conscious effort to use my affected hand.
The whole prosthetic hand thing brings to mind a certain Big Bang Theory episode…