There’s an old adage that when performing a live demo, previously working hacks will mysteriously go awry. In this case, the hardware demo was doomed before it ever arrived at the conference.
PinJig is an interesting take on though-hole soldering. As its name indicates, it’s a jig which holds through-hole components in place as the board is flipped on its side (or even upside down). This is accomplished by 2000 steel pins which are locked in place after being nestled around all of the board’s components. Unfortunately, carrying this prototype onto an international flight didn’t work out. [Niall Barrett] told us that on his way from Ireland to Bay Area Maker Faire he was required to ditch the 3-inch steel pins that make up the jig, or not get on the plane.
Lots of solutions have been proposed and enacted for multi-color and multi-material 3D printing, from color mixing in the nozzle to scripts requiring manual filament change. A solution proposed fairly early on was to manually splice the filament together, making a custom spool. The printer would print as normal, but the filament would change color. This worked pretty well, but it was tedious and it wasn’t entirely possible to control where the color change happened on the model.
You’ll find some examples of the more successful manual splicing hacks in the pictures below. Scroll down a bit further to find our interview with Mosaic Manufacturing at Bay Area Maker Faire 2016. They have a new product that automates the filament splicing process with precision as the ultimate goal. It unlocks a single extruder printer to behave like a multi-extruder model without stopping and starting.
Mosaic pulled off a very difficult combination of two methods mentioned above. Their flagship product is a machine they’ve dubbed, “Palette”. It’s an automatic filament splicer. Up to four different filaments can feed into Palette, and it will splice them at determined intervals. This would be cool by itself, if only to save the tedium of splicing and winding a custom spool by hand.
The real killer app with Palette, however, is the software that runs alongside it. Palette can take the GCODE output of any properly prepared multi material file from any slicer, and then precisely combine and splice the filament. This can feed into any printer without modifying it, aside from sticking an encoder somewhere in the filament path. The results are indistinguishable from a dual, or quad extruder set-up.
There’s a gritty feel to the Hackerboat project. It doesn’t have slick and polished marketing, people lined up with bags of money to get in on the ground floor, or a flashy name (which I’ll get to in a bit). What it does have is a dedicated team of hackers who are building prototypes to solve some really big challenges. Operating on the ocean is tough on equipment, especially so with electronics. Time and tenacity has carried this team and their project far.
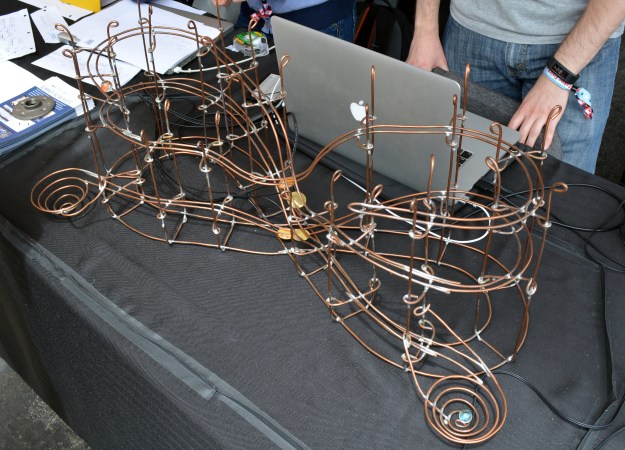
Building a marble run has long been on my project list, but now I’m going to have to revise that plan. In addition to building an interesting track for the orbs to traverse, [Jack Atherton] added custom sound effects triggered by the marble.
I ran into [Jack] at Stanford University’s Center for Computer Research in Music and Acoustics booth at Maker Faire. That’s a mouthful, so they usually go with the acronym CCRMA. In addition to his project there were numerous others on display and all have a brief write-up for your enjoyment.
[Jack] calls his project Leap the Dips which is the same name as the roller coaster the track was modeled after. This is the first I’ve heard of laying out a rolling ball sculpture track by following an amusement park ride, but it makes a lot of sense since the engineering for keeping the ball rolling has already been done. After bending the heavy gauge wire [Jack] secured it in place with lead-free solder and a blowtorch.
As mentioned, the project didn’t stop there. He added four piezo elements which are monitored by an Arduino board. Each is at a particularly extreme dip in the track which makes it easy to detect the marble rolling past. The USB connection to the computer allows the Arduino to trigger a MaxMSP patch to play back the sound effects.
For the demonstration, Faire goers wear headphones while letting the balls roll, but in the video below [Jack] let me plug in directly to the headphone port on his Macbook. It’s a bit weird, since there no background sound of the Faire during this part, but it was the only way I could get a reasonable recording of the audio. I love the effect, and think it would be really fun packaging this as a standalone using the Teensy Audio library and audio adapter hardware.
With more and more previously industrial processes coming online in the home shop, people are finding that getting the information that was previously provided by the manufacturer of a hundred thousand dollar machine for their three hundred dollar Shenzen special is not easy.
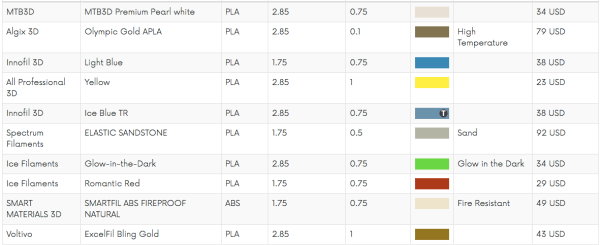
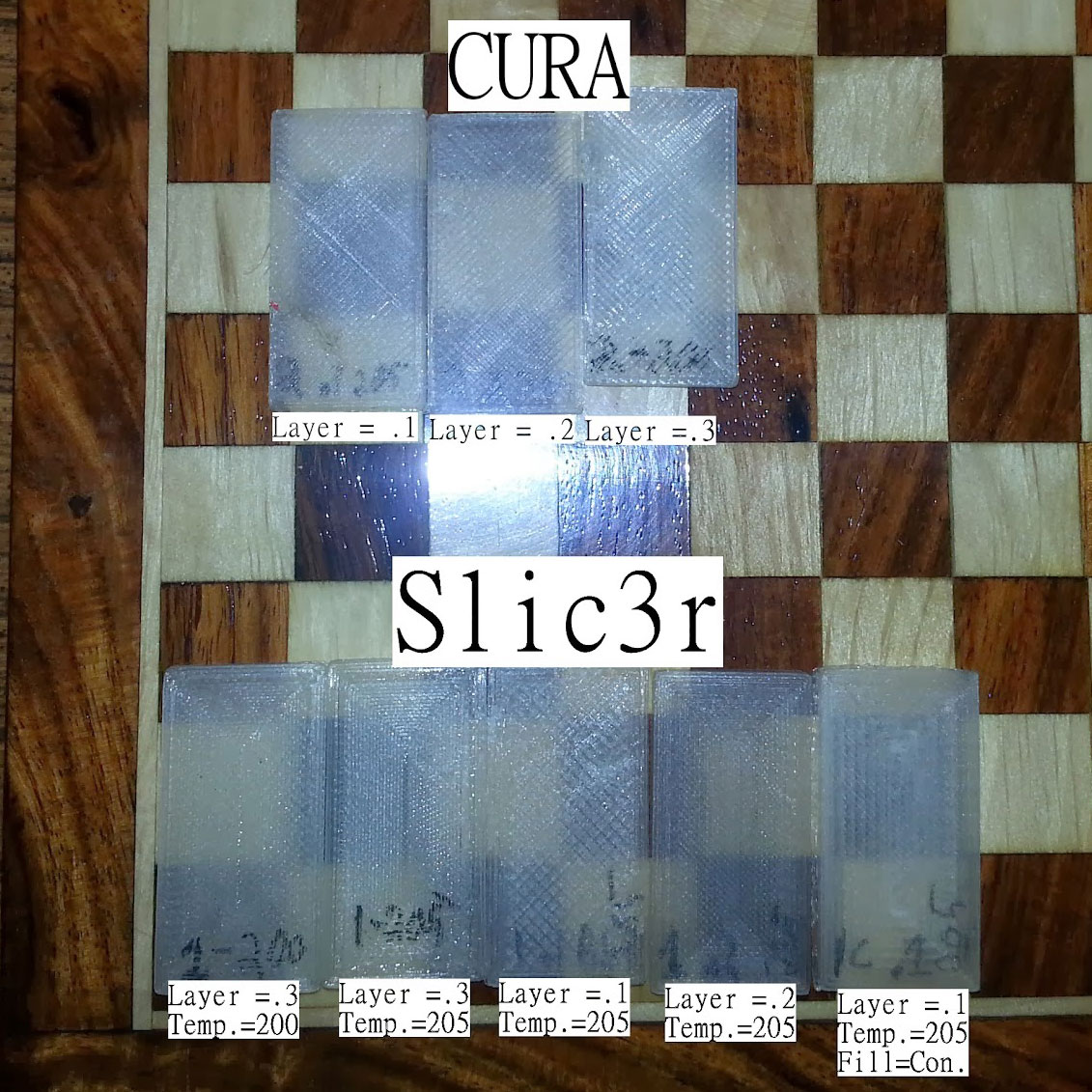
Some early work from UFID shows how even different Slic3rs can change the expected material properties of a filament.
A common example is this, a hacker purchased themselves a brand new 3D printer off amazon for a price too good to be true. After a week of tinkering with it, a small fire, and a few replacement parts later, they get it to work. After they’ve burned through, perhaps literally, the few hundred grams of filament that came with the printer at the setting recommended by the manufacturer, they do a small blanket order of the different filaments out there. Now comes the trouble, each printer is a little different and each filament has different properties. Most people find that the second spool of filament they feed into their printer doesn’t work at all. What’s the quickest way to get the right temperature, cooling, and feed settings for your printer configuration?
This isn’t a problem for the expensive machines. Epilog, a manufacturer of laser cutters, provides a grid of settings for each material you’re likely to cut, tuned to the different properties of each model of laser cutter they sell. Same goes for the expensive industrial 3D printers, each (very expensive) spool of material has the setting sitting in a chip in the casing. When the spool is slotted in the machine, it reads the settings and adjusts accordingly. All the work of tuning was done in a lab somewhere and the print is, theoretically, guaranteed.
Your Oshpark order would get delayed, your Lulzbot support case would be dropped, Teensies would ship late, and the Amp Hour would just be the EEVBlog Podcast if this bar burnt down, but it was a great event!
While we were at the Bay Area Makerfaire 2016, we had a chance to talk to [Gauthier de Valensart] and buy him a beer at the Hackaday Meet-up. [Gauthier] is from Belgium where he is the founder of a start-up with one of those fancy new TLDs: filaments.directory. The goal of filaments.directory is to create a database of 3D printer materials and link that up with a user’s 3D printer settings. The eventual goal being, much like the industrial printers, a user would be able to simply scan a barcode, or wave the spool over an RFID reader to input the needed settings into his slicing software or printer.
This sounded familiar to me, not the least because I had started work on it as an extension for repables.com when that was a larger focus in my life. In fact, I remember, while I was kicking the idea around to people at MRRF, that they kept telling me someone else was working on a similar project. I wanted to introduce [Gauthier] to the person who was working on the project back then. Since I was at a bar full of people in the industry, I sort of helplessly rotated in my spot trying to find someone who might remember. I spied [whosawhatsis], a common attendee of MRRF, and asked him. Okay, that was easy, [whosawhatsis] informed us that is was his project… introduction complete. Goes to show you what a good networking event buying a bunch of nerds beer can be.
They got a pretty okay logo while they were at it.
The project was called, “Universal Filament Identification System,” and it proposed to, “… eliminate the guess-work,” by, “…developing a method for tagging, tracking, and identifying filament for 3d printing in machine-readable formats…” The project appears to be mostly dead now and its domain is a placeholder. I think it suffered from the standard open source feature creep, but the idea is sound.
Which gets us to the questions. There are a lot of difficulties with creating such a system. The first being the data collection. Who should be responsible for measuring the filaments, the materials for laser cutting, or any other process that needs tuned settings? The ideal track, of course, would be for the manufacturers to hold themselves accountable and report on the settings for their filaments. However, many filament manufacturers rely on the ignorance of users to sell dodgy products, it’s only in the interest of a few top-quality ones to do so. If the users do so, then how will the information provided be vetted? You definitely don’t want someone’s ignorance about a faulty thermistor to encourage you to run PLA at 280C.
More and more difficulties arise. How should the information be transferred, etc. What properties should even be recorded? UFID was going as far as to use a color sensor to keep track of colors between batches from 3D printer manufacturers. In the end it’s about creating standards in a standard-less industry by using crowdsourcing. Either way, take a look at what [Gauthier]’s doing (and send him some feedback), read the backlogs of UFID, think about how annoying it was to get the right settings for a laser cutter the last time you used one, and let us know your thoughts in the comments.
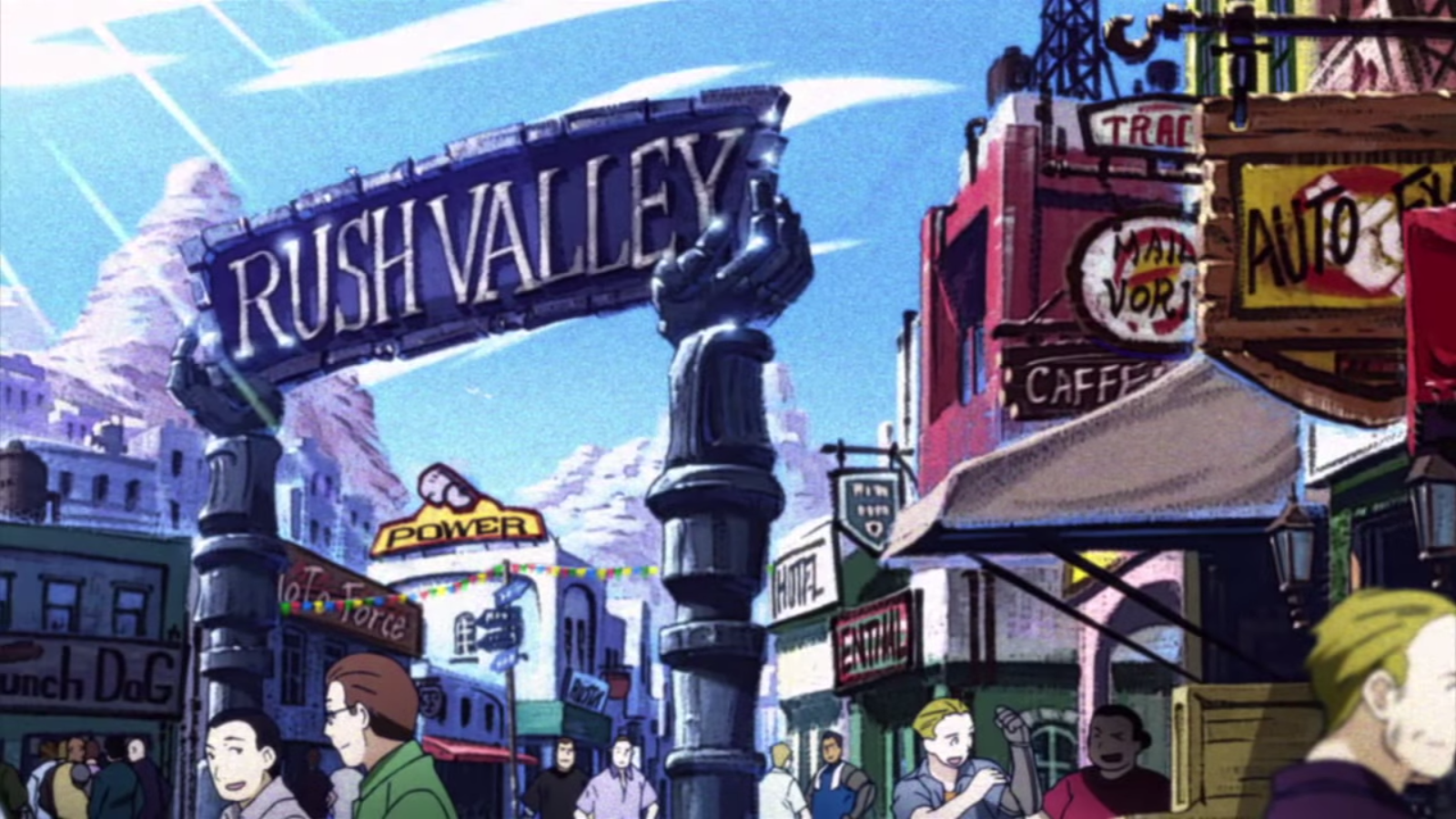
Even the city’s welcome sign is held high by two prosthetic arms.
In the show Full Metal Alchemist, there’s a city called Rush Valley whose main and only business are the high performance prostheses called Automail. Engineers roam the street in Rush Valley; the best have their own shop like that of the high-end clothiers in Saville Row. Of course; it’s all fantasy set in a slightly ridiculous Japanese cartoon, but while walking through this year’s Maker Faire I began to wonder if is a future that may come to be.
The problem with prosthetics is the sheer variety of injuries, body types, and solutions needed. If an injury is an inch higher or an inch lower it can have a big effect on how a prosthetic will interact with the limb. If the skin is damaged or the nerves no longer function a different type of prosthesis will be needed. Some prostheses are to replace a lost limb, others are to assist an ailing body in order to return it to normal function. More than a few are simply temporary aides to help the body along in its healing efforts. Unfortunately, this means that it’s often the case that larger companies only sell the prostheses people are most likely to need; the rarer cases are often left without a solution.
The e-Nable project doesn’t mess around.
However, we see hackers stepping up and not just working on the problems, but solving them. One of our semifinalists last year, openbionics, inspired one of the projects we’ll be talking about later. There are robotic legs. We met a guy at MRRF who has been 3D printing hands for his son from the E-nable project.
Along these lines, we saw two really cool projects at Maker Faire this year: The first is the Motor-Assistive Glove, or MAG. MAG is designed to help people with Peripheral Neropathy regain some use of their hands while they go through the lengthy road to recovery. Perhipheral Neuropathy is a disease, usually resulting from diabetes, toxin exposure, or infection, where the nerves are damaged in such a way that typically the hands and feet are no longer mobile or feel sensation in a useful way. Once the disease is in full swing, a previously able person will find themselves unable to do simple things like hold a can of soda or grasp a doorknob firmly enough to open it.
The Motor Assistive Glove
We had a chance to interview one of the members of the MAG team, [Victor Ardulov], which you can see in the following video. [Victor] and his group started a research project at the University of Santa Cruz to develop the Motor-Assistive Glove. The concept behind it is simple. People with Peripheral Neuropathy typically have some movement in their hands, but no strength. The MAG has some pressure sensors at the tips of the fingers. When the user puts pressure on the pad; the glove closes that finger. When the pressure is off; the glove opens. The concept is simple, but the path to something usable is a long one.
Gerrit and I were scoping out the Intel booth at Bay Area Maker Faire and we ran into Nolan Moore who was showing of his work to mash together a Nintendo Power Glove with an AR Drone quadcopter. Not only did it work, but the booth had a netted cage which Nolan had all to himself to show off his work. Check the video clip below for that.
The control scheme is pretty sweet, hold your hand flat (palm toward the ground) to hover, make a fist and tilt it in any direction to affect pitch and roll, point a finger up or down to affect altitude, and point straight and twist your hand for yaw control. We were talking with Nolan about these controls it sounded sketchy, but the demo proves it’s quite responsive.
The guts of the Power Glove have been completely removed (that’s a fun project log to browse through too!) and two new boards designed and fabbed to replace them. He started off in Eagle but ended up switching to KiCAD before sending the designs out for fabrication. I really enjoy the footprints he made to use the stock buttons from the wrist portion of the glove.
A Teensy LC pulls everything together, reading from an IMU on the board installed over the back of the hand, as well as from the flex sensors to measure what your fingers are up to. It parses these gestures and passes appropriate commands to an ESP8266 module. The AR Drone 2.0 is WiFi controlled, letting the ESP8266 act as the controller.