If you deal with electronics, you probably think of static electricity as a bad thing. It blows up MOSFETs and ICs and we take a lot of pains to prevent that kind of damage. But a start-up company called Grabit is using static electricity as a way to allow robots to manipulate the real world. In particular, Nike is using these robots to build shoes. You can see a demo video, below.
Traditional robots use human-like hands or claw-like grippers to mimic how humans handle material. But Grabit has multiple patents on electroadhesion. The original focus was wall-climbing robots, but the real pay off has been in manufacturing robots since the electrostatic robots can do things that mechanical hands are a long way from duplicating.
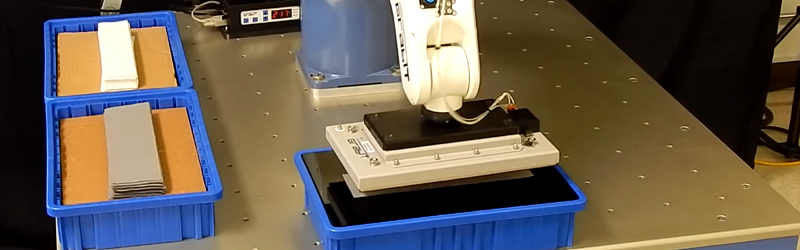
The shoe making robot works with a human partner. Where a human can set up a shoe in about 10 or 20 minutes, the machine/human partner can do it in about a minute. Software shows the operator how to place material on a glass table. A platform covered in electroadhesive pads picks everything up. When in the right position in a heat press, the charge turns off, releasing the material.
Because the technology is patented, it ought to be easy to find out what the principle of operation is. The basic operation seems pretty obvious, anyway. We’ll be interested in seeing what the hacking community could do with electrostatic robotics.
We have a soft spot for odd robot hands. If you want something simpler, you can go to Ikea.














Static electricity is fine. Electrostatic Discharge is not.
So this means the materials the shoes are made from are electrostaticly chargeable. This should really amplify the triboelectric effect. That’s the voltage amplifying effect when you walk across a carpet. Wearing these shoes might amplify electrostatic discharges, and charge your hair so it stands upright.
Nearly any isolating material is electrostatically chargeable. And normally shoes don’t contain much conductive material – except ESD-safe shoes.
But the principle is decades old. Think of electromechanical plotters with electrostatic paper adhesion. The drawing surface was basically a PCB with 2mm wide traces (1-2mm distance) and covered with some insulating plastic film. To fix the paper the HV was switched on, to release it, it was switched off.
I would pay extra for shoes that made my hair stand up when I walked across carpet.
Funny how “it” lifts so slowly then pauses over the edge as if it may not hold or get two and need to let the second one fall.
Shoes made out of condom thin stuff…
It’s pausing over the edge because there’s a camera facing towards the bottom of the manipulator.
Watch the left side of the screen.
There appears to be a feedback loop with the machine vision dynamically changing the placement of the sheets so they align correctly with the fixture and each other. A bit of a slow process overall, probably some room for improvement there as well?
You can spend money on highly accurate fixturing or a vision system. If it’s a system you want to reuse vision system is the way to go.
Most boring robotics video ever! lol
This is quite a cool application:
https://youtu.be/0DgORq2bbTI
Color me impressed. Being able to pick up grocery objects of significant weight without denting or crushing them is a game changer.
Between the paddle-based variants for picking up boxes, and this version for handling produce, and planting machines and self-driving trucks, it is conceivable that food could soon go from seed to a crate on your doorstep without ever being touched by a human hand.
For better or worse…
I wonder how long it will be before we see kits for these end-effectors on aliexpress?
Look at end effectors from Festo. Particularly the Octopus gripper.
Edit – I see it’s behind one of the article links.