The third version of [Henrik Forstén] 6 GHz frequency-modulated continuous wave (FMCW) radar is online and looks pretty awesome. A FMCW radar is a type of radar that works by transmitting a chirp which frequency changes linearly with time. Simple continuous wave (CW) radar devices without frequency modulation cannot determine target range because they lack the timing mark necessary for accurately time the transmit and receive cycle in order to convert this information to range. Having a transmission signal modulated in frequency allows for the radar to have both a very high accuracy of range and also to measure simultaneously the target range and its relative velocity.
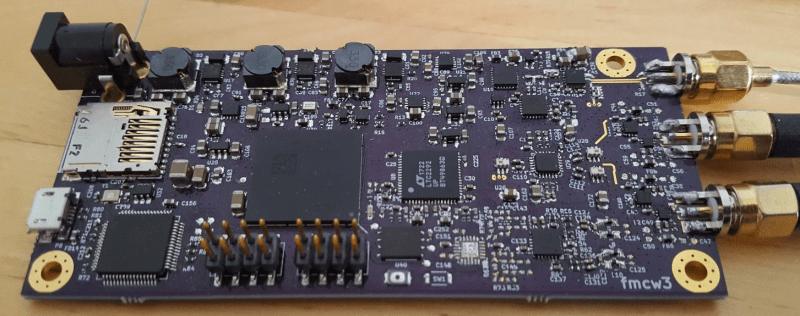
Like the previous versions, [Henrik] designed a four-layer pcb board and used his own reflow oven to solder all the ~350 components. This process, by itself, is a huge accomplishment. The board, much bigger than the previous versions, now include digital signal processing via FPGA.
[Henrik’s] radar odyssey actually started back in 2014, where his first version of the radar was detailed and shared in his blog. A year later he managed to solve some of the issues he had, design a new board with significant improvements and published it again. As the very impressive version three is out, we wonder what version four will look like.
In the video of [Henrik] riding a bicycle in a circle in front of the radar, we can see the static light posts and trees while he, seen as a small blob, roams around:
[wpvideo teKfN2cO]














“In the video of [Henrik] riding a bicycle in a circle in front of the radar, we can see the static light posts and trees while he, seen as a small blob, roams around:”
Notice the smearing too.
Maybe just vibration? From the wind?
To me it looks like the image still needs a lot of post-processing. Right now it spreads in a cone shape (makes sense), one would need to render all that out. But that is normal for digital image sensors: You get a result, but clever processing is what you really need for consistent results.
It is the nature of imaging sensors that they present an image of a conical volume. Cameras do this – if you take a picture with a lens having a 60 degree angle of view, it presents a picture that represents a conical – well, actually pyramid shaped, assuming the sensor is rectangular – space. It just doesn’t display it that way. You could easily present the data from the system described in this article in flat projection, but then you’d lose the depth information, wouldn’t you? How would you suggest “rendering out” the wedge shape of the display? By truncating all but a rectangular portion of it? That doesn’t seem like the best idea. If you want to see things outside that cone, there’s no way around it: you still have to physically get the beam to the areas of interest, either by scanning a wide enough angle or using multiple sensors with overlapping fields.
I follow this guy for years now, and he’s freakin amazing!!
Very nice and interesting board! Good job! What’s the actual difference between CW and FMCW and why is the latter better at determining range? Thanks
FMCW is a misnomer – since CW means an unmodulated carrier, and FM is a form of modulation, the term is nonsense. But what it means in practice is a signal of constant amplitude that is swept in frequency at a constant rate (in hertz/second). This allows you to determine the distance to an object by measuring how much the frequency of the reflection from that object differs from the frequency currently being transmitted. A reflection from a distant object would show more difference in frequency because it is a reflection of what was being transmitted in the more distant past, when the transmitter was at a more different frequency.
As for why FMCW is “better” at determining range, without the modulation, fixed objects all reflect the same frequency, and all objects of a given relative velocity reflect the same doppler-shifted frequency. Distance isn’t a factor. So CW is not just worse, it’s completely useless in determining range.
The next question you might ask is, if velocity causes a frequency shift, and distance causes a frequency shift, how can you separate the two to measure both? The solution to that is to sweep the frequency linearly upward for a certain period, then linearly downward for a certain period. This will cause the shift due to distance to be in the opposite direction on the up and down sweeps, while the shift due to velocity will be in the same direction regardless of the direction of transmitted frequency sweep.
Thank you for your answer! So, suppose we have two fixed objects, one further away than the other. In the CW scenario, can’t we decide on the range based on the time difference of arrival of the two reflections relative to the time of transmission? Intuitively, the reflection coming from the object further away will take more time to come back allowing us to decide on two distinct ranges since we know the time of flight of the signals.
“the object further away will take more time to come back allowing us to decide on two distinct ranges”
As we are talking about CONTINUOUS Wave, we don’t know when the reflected wave was originally transmitted.
e.g. Most aircraft tracking radar is PULSED, the operator knows when the pulse was transmitted, therefore the TOF can be computed to distance. Chirping a pulse also helps in ranging the target.
https://en.wikipedia.org/wiki/Pulse_compression
It’s pulsed because the inverse square law kicks in and a long range FMCW radar would require ridiculous amounts of power, not to mention it would be fairly destructive at shorter ranges.
The really long range radars (>100km) can have peak pulse power over 1MW, yet the average power is rarely over a few kW.
about the ranging of FMCW radars – that’s why the frequency modulation plot is a saw wave, we don’t care when it was transmitted, the beat frequency that comes out of the mixer (sum of transmitted and received signals) is directly proportional to range, algebra at work.
If you’re worried about the next chirp interfering with the previous one – FMCW radars are inherently short range devices because of reasons mentioned at the top, it simply is not a concern.
and speaking of aircraft – radar altimeters are almost exclusively FMCW, because of their relative short range, simplicity and better natural resistance to interference.
Awesome summary. This answers the questions I had when reading the single blog entry linked above.
How fast is the Chirp? It seems like you could do a cross-correlation between the outgoing chirp and the returning echo to get a time delay for distance. You might get some phase information out of this as well. This might also require some wicked fast sampling and processing though.
The chirp rate is a compromise, so it’s tailored to the individual application. The longer range you need, the slower the chirp rate, which is the main deciding factor (you have to ensure that the reflections from the most distant target of interest arrive within the same chirp cycle), but you also get a compromise between scan rate (and therefore angular resolution and refresh rate) and distance resolution, because distance gets harder to measure the faster the chirp rate.
FMCW radar was developed initially for radar altimeters for aircraft, in a way that was simple and cheap, and could be made small. FMCW was far cheaper to implement than pulsed radar. This was the vacuum tube era, when every active device added significantly to the overall price. So while FMCW may be complex conceptually, in practice it’s pretty simple to implement. Not to take anything away from [Henrik Forstén]; his project is awesome.
Wicked fast sampling and processing is exactly what we’re getting good at, now. That’s what has made Software Defined Radio practical. You can think of projects like this as “Software Defined Radar”.
As to your thought about phase information, probably not. Keep in mind that phase modulation is a type of frequency modulation, and vice-versa. You can’t get phase information from a received signal unless you have a stable phase reference coherent with the transmitted signal, but if the transmitted signal frequency is constantly changing, the phase is also constantly changing, so there really can’t be such a reference.
wow!! this is a really impressive project.
The smearing (or noise in the direction for objects further then 50 meters) I consider not to be a big issue considering the fact that the antenna’s are very close to each other making it much more difficult to accurately determine direction as opposed to a setup where the antennas were more spaced out.
Great job!
I have been working on a similar 18ghz FMCW radar for years and have not gotten a single image yet
Major kudos to the engineer behind this, this looks amazing and I would love to get my hands on one
I understand that CW radar can measure only Doppler shift (i.e. velocity) of objects around it, but what is advantage of FMCW over classical, pulse modulated radar? Is it perhaps easier to detect the reflected signal when it is persistent as opposed to intermittent, short pulse one, so therefore it doesn’t need such great instantaneous transmitted power?
And if it detects position by mixing current outgoing signal with currently received signal (getting lowest frequency product of certain constant frequency, proportional to distance), then how it discerns position information from velocity information for a particular target?
It could use a dual-slope chirp (where doppler shift would produce opposite sign offsets on attack and decay slopes) and keep acquisition (spectrum) from first half of chirp in memory, then match it to the second half to find if certain peak in the spectrum is shifted in it, and if it is, then position is proportional to the middle between the two, and velocity is proportional to (the half of) their difference.
However, there is still a possibility that objects at certain distances may (temporarily) shadow certain velocities of objects near them.
After I wrote the above, I found this paper(pdf alert) which concurs with double-slope approach for measuring both distance and velocity. However, they used laser radar, which has very tight beam, so for their application having echoes from multiple targets was not a concern.
Is there maybe another, more straightforward way to measure velocities of multiple objects with FMCW? Perhaps something to do with shortening of the duration of a “tone” representing a moving object in radar’s view? Then, by observing the time domain, maybe it would be possible to detect little “steps” in amplitude of certain spectral component and conclude that it means there is a moving object “shadowed” by another object?
The main problem with pulsed radar is resolution: distance resolution is limited by the pulse width, with narrower pulses giving better resolution. And when you’re trying to resolve inches, those pulses are in picoseconds. But narrower pulses mean average power is diminished, and the receiver bandwidth must be correspondingly wide, raising the noise floor, and lowering your s/n ratio. You lose on both ends. You are also limited to transmitting one pulse and then receiving all of the responses for that pulse before sending the next one.
With FM, you can picture this as sending and receiving a whole bunch of very short pulses, at different frequencies, in an overlapping sequence. It’s also easier to sweep frequency very quickly to get a very short effective pulse width, than it is to modulate with discrete pulses. Or at least it was when I was in the radar business, which was decades ago.
Pulse doppler is more straightforward, if that’s your main concern – if you’re sending pulses of a fixed frequency, you can analyze the return signal for both delay and frequency, which correspond to position and velocity, BUT you run into an uncertainty problem: very literally, and not in the quantum sense, the more precisely you try to measure position (by decreasing the pulse width), the more spread out the spectrum of your pulse is, which degrades your velocity detection. And that’s where your signal-to-noise ratio (see first paragraph) hurts you.
In a way, pulse vs. FM radar is a little like spectrum analysis by swept receiver vs. analysis by fourier transform of a window in time – you can get more information quicker by analyzing a whole range of frequencies at once than by separate measurement at each frequency. Same with radar: FM can give you a much higher information rate.
By the way, thanks for the link to that article – I learned a new term from it: “brassboard”. I take this from context to mean something like “breadboard, using off-the-shelf microwave components”, since microwave modules are usually implemented as blocks of brass with coaxial interconnects.
Also by the way: your conjecture about storing received responses and comparing them from one measurement period to the next is an established method in radar called moving target detection or moving target indicator. In ancient systems this was done by comparing the phase relationships between successive return pulses. It was intended for removing high-amplitude returns from nearby fixed targets so you could see the moving ones, but it was not all that great, because as the antenna system scanned across a field, any fixed objects such as buildings with walls at an oblique angle to the beam would also exhibit a phase difference from one pulse to the next, giving them a perceived velocity. This led to more sophisticated techniques that would only detect targets whose phase changed by some minimum amount (velocity discrimination) between the most recent pulse and the TWO previous pulses. Originally the memory was implemented using huge quartz crystal delay lines (I’m talking about 12″ diameter faceted crystals – no idea how much those cost), and then later using digital storage. Still, lots and lots of false targets.
I wonder at what point projects like this start approaching the world of export controls…
That reminds me of the New Zealander that allegedly built a DIY cruise missile about 15 years ago.
I remeber that one… It was labeled as a DIY cruise missle, but was just a pulsejet. Interesting tech though. Pretty sure the local government shut him down…
Just amazing.
Version 4 will generate 3D models of all objects within its view and render them.
Version 5 will 3d print them.
The smearing is the scattering response. It still needs processing to form an image. In reflection seismology it’s called “migration”. There is software for this in the Seismic Unix package, though it would need some changes for the change in geometry.
The early synthetic aperture radar systems did the processing using a conical lens. The signal was recorded on a strip of film that was run by a CRT sweep transverse to the film.
What are the key differences between Henrik’s radar and commercially available radar systems in terms of performance and functionality?