When you think of sports, you usually think of something that takes a lot of physical effort. Golf is a bit different. Sure, you can get some walking in if you don’t take a cart. But mostly golfing is about coordination and skill and less about physical exertion. Until you want to practice driving. You hit a bucket of balls and then you have to go walk around and pick them up. Unless you have help, of course. In particular, you can delegate the task to a robot.
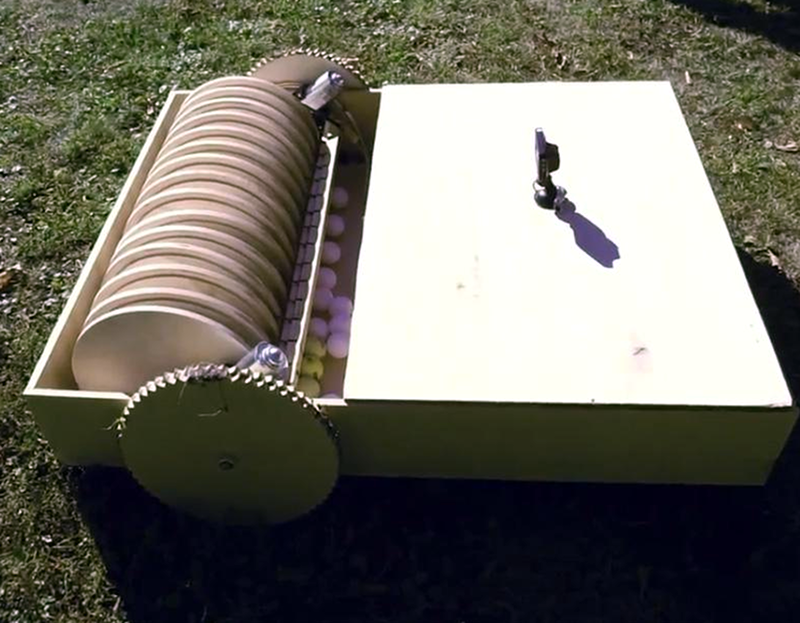
The robot that [webzuweb] built looks a little like a plywood robot vacuum. However, instead of suction, it uses some plywood disks to lift the balls and deposit them in a hopper. The electronics consist of an Arduino and an Orange Pi Lite. A GPS tells the robot where it is and it develops a search pattern based on its location.
Although [webzuweb] notes he isn’t done with the project, it looks pretty good. He describes the software, but it doesn’t appear to be posted anywhere. However, he does describe its operation and how it changes mode based on its current state.
We can’t decide if golf is really a sport or more of a game. We were surprised to read that if you carry your own bag and don’t use a cart you can burn about 360 calories an hour which is somehow more than a gymnast burns, which hardly seems possible.
Of course, most people use a cart and a caddy, so they aren’t going to burn those calories. If you are in the market for a cool cart, we liked this one. Or, perhaps you’d like one with more power.














“When you think of sports, you usually think of something that takes a lot of physical effort.”
Chess!
Chess boxing
https://en.m.wikipedia.org/wiki/Chess_boxing
B^)
“usually”
So I ask myself why both an Orange Pi and an Arduino? He says he interposes the Arduino to avoid the need for a bunch of 3.3 to 5 volt level shifters. So in essence the arduino is being used as a set of multiplexed level shifters. I’m not sure just what to say about that.
My guess is development started on the arduino, but he required more processing. Instead of recreating the motor driver handling and low level sensor duties (debounce and filtering), keep them on the arduino and read/command from the pi.
Probably cheaper than that many 555’s ;~} But seriously, an arduino kicks butt for time-deterministic things, while anything running a modern preemptive operating system that can do “hard thinking in an easy language”is by definition not real time – things get preempted. This is an architecture I use around my LAN of things fairly often, and is and has been alive and well in your PC for like…decades perhaps? Hard to find an interface card (from back when those were even a thing) that didn’t have it’s own dedicated microcontroller on it – disk drives still do for example. Jay Lowe below could be right too…there can be a lot of reasons to do things like this, especially when many hours of your time saved is worth more than a mere couple bucks of hardware. Not everything deserves to be designed down to the penny to be made in millions. That’s an art of its own.
Using floppy disks (see what I did there?) to pick up the balls is genius. This to saleable product really isn’t that far.
If you’re a decent golfer, there’s way more than just skill, coordination, and “some walking”. You’re using multiple sets of muscle groups in your legs, back, torso, and arms to generate a lot of power for getting distance, height, and spin to make the ball do what you want. Typically about 1/2 to 2/3 of your shots on the course are made with a full swing, so that’s 40 to 50 significant exertions PLUS walking 4 to 5 miles over a 4.5 hour period (sometimes up/down some impressive slopes). It can be a hell of a workout!
There’s a nice flat surface on top that could hold solar panels. The machine could be left on the driving range 24/7, accumulating charge, doing ball patrol, dumping the balls, then stopping to charge again.
These robotic projects are always better when they show the video. ????
https://reddit.com/link/9gmhx4/video/295ro1jr4um11/player