How does a submarine talk to an airplane? It sounds like a bad joke but it’s actually a difficult engineering challenge.
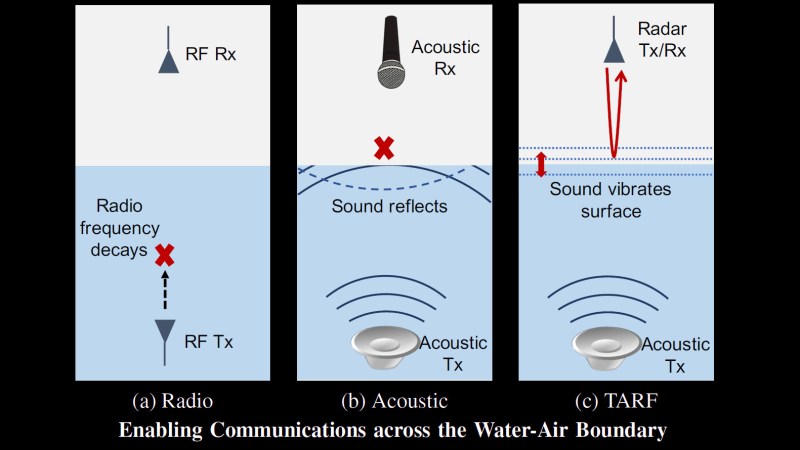
Traditionally the submarine must surface or get shallow enough to deploy a communication buoy. That communication buoy uses the same type of radio technology as planes. But submarines often rely on acoustic transmissions via hydrophones which is fancy-talk for putting speakers and microphones in the water as transmitters and receivers. This is because water is no friend to radio signals, especially high frequencies. MIT is developing a system which bridges this watery gap and it relies on acoustic transmissions pointed at the water’s surface (PDF warning) and an airplane with high-precision radar which detects the oscillations of the water.
The complexity of the described setup is mind-boggling. Right now the proof of concept is over short distances and was tested in a water tank and a swimming pool but not in open water. The first thing that comes to mind is the interference caused by waves and by aerosols from wind/wave interactions. Those challenges are already in the minds of the research team. The system has been tested to work with waves of 8 cm (16 cm measured peak to trough) caused by swimmers in the pool. That may not sound like much, but it’s about 100,000 times the surface variations being measured by the millimeter wave radar in order to detect the hydrophone transmissions. Add to that the effects of Doppler shift from the movement of the plane and the sub and you have a signal processing challenge just waiting to be solved.
This setup is very interesting when pitched as a tool for researching aquatic life. The video below envisions that transmitters on the backs of sea turtles could send communications to aircraft overhead. We love seeing these kinds of forward-thinking ocean research projects, like our 2017 Hackaday prize winner which is an open source underwater glider. Oceanic studies over long distances have been very difficult but we’re beginning to see a lot of projects chipping away at that inaccessibility.














Very nice idea.
The main drawback is that the communication is one way only, from water to air.
plane could drop a disposable acoustic message buoy that would activate as soon as it hits the water. transmit its message several times and then shut down (or self destruct as you would probably want to do for military applications). not as good as full 2-way communication but it would allow the aircraft to respond to messages.
If you’re going to drop a buoy, you may as well make it a full-blown two-way RF-to-Acoustic transceiver. The incremental cost would be negligible, and far more reliable than this scheme.
Well, if you want to send messages from a plane to a submarine, you can do that, but it takes a while because you have to use a ground station that relays the transmission using ELF (example: https://en.m.wikipedia.org/wiki/Project_Sanguine). However this is slow and you cannot send too long strings and it’s not safe.
Not the only way anymore. Think blue-green laser on an orbiting asset….and detectors with very high QE.
The US Navy was testing the laser concept back in the mid 1980’s.
Can someone explain the equation derivations ? (beginning in section 4.1). To me, and I’m only an ‘old school’ EE – it looks as if they just pulled those expressions out of their ass. Without any physical relationship to the quantities supposedly being expressed.
Is there a specific formula you have issues with? Most of them seem to be quite related to physical quantities and constraints.
But maybe I’m being naive. I’m no EE or signals analyst.
Those look like a perfectly normal way to write a frequency-domain description of a pressure wave and its behavior at a boundary between different media. Was there a specific equation that didn’t make sense?
Having actually tried this myself, big kudos to the guys who can demonstrate that it can work. It’s a remarkably difficult problem.
However, the idea of using blue-green pulsed lasers for communicating between air (or space) vehicles and submarines at depth has been around since at least the 1960s, and actively investigated since the late 70s. Scientific American even did a piece on it sometime last century. It seems a much more viable technology than this one. The paper authors are aware of the work, referencing the literature, but curiously not mentioning it in the text, or downplaying the range of optical methods in general.
And the paper completely misses the fact that it is possible (and even easy) to go the other direction too: Sea water automatically transduces absorbed RF energy into acoustic waves, through the thermoacoustic effect. It’s actually easier to go RF-to-Acoustic than Acoustic-to-RF, though the transduction efficiency is putrid in either direction.
Would a high depth resistant underwater drone launched from a sub port like out the torpedo chamber be able to surface with the right stuff for above relay signals? Then it could return via GPS to home sub at bottom & resecure itself by some means like magnet charge or latching interface? Until the appropriate signal method is developed that is.
Aside from GPS not working under water, that sounds like a straightforward engineering problem.
It might be simpler to just pop an antenna up on a long feedline, and reel it back in when done. Which I’m sure they already do — they already reel out a few hundred meters of VLF antenna when they need to: it pops up to a few meters underwater while the sub stays safely deeper.
Seems like another technology designed to render cetaceans deaf.
Yeah, they kind of omit that little detail.
Using their own equations and numbers, it looks like they need to deliver many watts per square meter at the water surface: they need “a few microns” displacement to be detectable, and their graphs suggest they are using around 10 microns. That corresponds to a surface power density of 15 watts per square meter.
At the frequencies they suggest (100-400 Hz), the wavelength is 10 meters or so. That’s below typical sonar frequencies, enough that it would require a dedicated transmitter (and not use the sub’s sonar array). It’s conceivable a large sub could carry or deploy a phased array large enough to focus the beam to some extent, but it’s safe to say the beam width will be very large: say a steradian, best case. For a sub a hundred meters down, it will illuminate a surface patch a hundred meters in diameter: it’s transmit power will be spread over 8000 square meters or so.
So, to yield that 15 watts per square meter requires a transmit power of 120 kilowatts.
And if the sub needs to be deeper, the power required goes up as the square of the depth.
Yep, that’s loud.
Not every stealthy either. 100-400 hz at a hundred kilowatts would propagate quite a way and be easy to triangulate with the existing seabed listening sensors…
Multiple highly directional transducers with parabolic dishes focused on a single point? Thus you distribute the power across them and only reach the required power density at that point…
The dish shape would have to change based on depth, but maybe a telescoping design or inflatable bladders could be used…
How big a parabolic dish do you need to be “highly directional” when the wavelength is 10 meters or so?
Another problem it would give the sub’s position away to another an enemy vessel.
If a boomer used this it would have every hunter killer sub in a 500km radius know exactly where it is.
This is an impedance matching problem. I you can produce a smoothly varying mixture of air and water, the radio waves should pass through without reflecting back.
In other words, make air bubbles or spray some water to break the water’s surface.
Great idea. Then once that 60 GHz radio wave gets into the water, it can propagate just fine… For about a millimeter. The sub is likely to be somewhat deeper than that.
I wonder if you can listen to whale song and other underwater sounds with this.
Having worked with Scanning Laser Acoustic Microscopy, both in water and liquid metal (which work roughly the same way to visualize the structure of materials that the sound passes through, via laser-scanned perturbations on the fluid’s surface), I can’t imagine the signal to noise problems that the ocean and aircraft/surface ships will produce and that will generate three generations of academic papers and few practical results.
Don’t worry about it: It’s another art project out of the Media Lab. Practical results is not what it’s about. They use their own in-house brand of Smoke and Mirrors(TM) to make the bottom line all work out in the end.
Interesting technique, but unfortunately useless: If a submarine does not want to surface, it does not want to be found. Making lots of noise would be rather counterproductive then.
I don’t think this is a method of intentional communication, more like it’s a method of eavesdropping on underwater sounds from substantial elevation, e.g. from satellites passing above.
Or you can do what NATO does, they transmit on ELF radio bands. Its used to communicate between the Boomer subs and the various C+C aircraft, satellites, ground stations, command ships, etc.
The signals are capable of propagating through the earth when transmitted with buried antennas, or can communicate with with space platforms even when fully submerged on the other side of the planet (The intention is that they can always talk to the sub without needing to know where it is, or having its location be revealed in the transmission). The only problem is that at that low of a frequency, you can’t encode all that much into the signal, usually in the range of 2-3 baud.
Shame we can’t use neutrinos.
https://snoplus.phy.queensu.ca/Reactor_Neutrinos.html
I thought subs always used VLF?. A nuke sub cannot surface and risk being knocked out in a combat situation yet must recieve go/no go launch info. Couldn’t an aircraft just deploy a very long wire?
A buoy to pick up the sub’s sound and transmit is via radio, as well as to receive via radio and transmit as sound to the sub would accomplish the task remarkably well. Make the buoy’s receiver also remotely tune to enemy communication channels, sending it via sound to the sub, and it’d serve an added purpose.
The sub’s needs to hide is far greater than that of the plane, so the sub end might have highly directional sending and receiving, as well as a way to adjust the power to the minimum necessary.
why not use some disposable “probe” the sub can launch/release, that, once surfaced, and after some optional delay, will relay a message to c&c, and then self-destruct for some extra drama, or maybe even send a very low bandwidth, lower power VLF or sonar signal back into the local waters for the sub to receive.. I’m guessing something similar is already being used ..
MIT Media Lab overselling other peoples idea in rebranded package. The usual…
Dated, but always good for a repost: https://philip.greenspun.com/humor/media-lab
Clearly they could benefit studying something in the aquatic kingdom already existing like decoy floating debris, jellyfish antenna tethering, mechanical dolphins with real time sonar surface to air to reverse submersible clique agent relay mobilization?
Most of the stuff discussed in comments above already exists. we have VLF (only very low speed data however), we have store and forward buoy systems already, we also have systems lowered from helicopters that can do sonar and communication. I guess the trick is talking directly to the sub from the air but range would be an issue. If it is short range then you are giving away the subs position by being within X range of it. One problem is that putting high energy acoustics into the water is that it is not good for wildlife and it also makes a mess of sonar techniques that the submarines uses to find targets.