
Power is the bane of drone pilots. You’d like to fly longer which means a bigger battery. But a bigger battery will weigh more which leads to less flight time. You have to strike a balance and for most consumer drones that balance is about 20 minutes of flight time, more or less. Researchers at Berkeley have a different idea: don’t use a bigger battery, but simply replace the battery in flight.
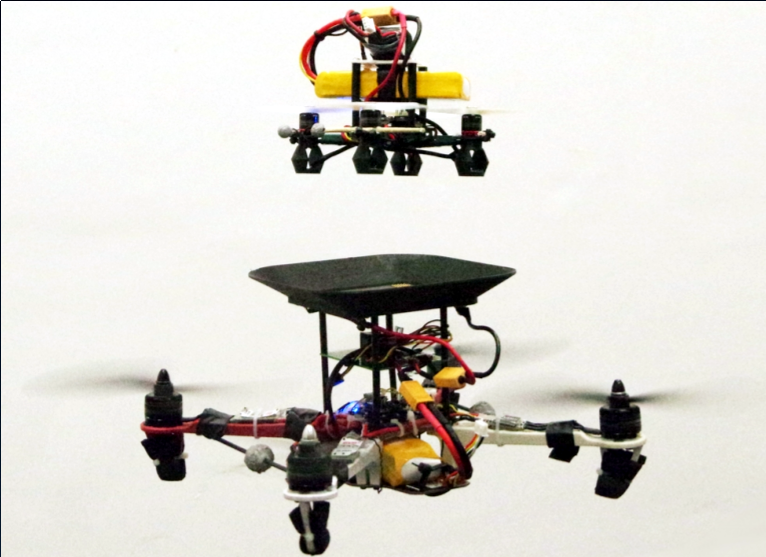
The idea isn’t completely new. After all, many planes refuel in flight — a technically sophisticated operation, but it occurs every day. The scheme here is to have a primary battery and a secondary battery. When the secondary battery is low, the drone ejects it while running on the primary battery. Another secondary battery flies to the drone and docks with it becoming the new main power source.
 In theory, it sounds pretty simple. In practice, though, you really have two drones. The main drone and a smaller one that carries the battery back and forth. Of course, you also need a way for the drones to find each other and dock.
In theory, it sounds pretty simple. In practice, though, you really have two drones. The main drone and a smaller one that carries the battery back and forth. Of course, you also need a way for the drones to find each other and dock.
The devil is in the details. Do you put a separate battery on the flying battery or do you let it sip from the payload’s charge? Do you fly batteries away gracefully or just dump them? How do they find each other? All things for a designer to consider. You also don’t want to put two wildly mismatched batteries in parallel, so the design uses some diodes, a FET, and a relay to keep the power source to one battery at a time.
We’ve looked at hybrid drones that combine electric motors with internal combustion engines to try to solve this problem. Or just throw in the towel and use gas.














So you have three drones, but only fly two at a time, when connected and only when one of them has a mostly dead battery (total battery starts at 75% after each swap and can only drop to 50% before another swap is needed).
To fly indefinitely the secondary battery needs to fly back to the charger, charge to full, then return faster than it takes for the remaining battery to discharge (total capacity drops from 75% to 50%).
Not sure this concept is fully thought out.
Once a drone lands, the discharged battery can be physically swapped out for a full one.
Longest lasting R/C flight power source I’ve used was a .60 cu in glow fuel engine converted to diesel specifically for low fuel consumption allowing extended duration flights of 6 hrs. This still left the radio needing a large battery pack but the model was large enough to carry that as the flight plan was straight line cross country from one body of water to another rather than battery wasting continual maneuverings around a fixed field. Solar cells were not advanced enough at that time for even powering servos, plus the flights had zero expectation of cloudless weather as required to fly in all weather save storms. It was a canard. 3 mo doing all the aerodynamics in a spreadsheet, then more months airframe design in Cadkey. The engine was the easy part.
In flight docking? Heh! You take bigger bites than I do! Have fun!
I think we just wait until density gets better or install small ic engines as generators.
No doubt is would be something the hobby pilots wall covet, But they will have have to wait the commercial users of such aircraft have their needs meet. Hopefully by that time the economies of scale kick in, making it affordable to hobbyists.
Where are the methonal based fuel cells that we were promised years ago for our laptops?
They exist but the efficiency still sucks.
Also methanol isn really bad for you, though its been said that a fix would be to mix it with ethanol and water so it would do less damage.
…upgrade the battery tech, where a “zap” will fully charge.
This is one of the most pointless bits of research I’ve ever read about… Instead of all this tech crammed into the main drone and the shuttle, simply make two main drones and interchange them, while charging extra batteries separately. Working out a smart way to seamlessly hand over whatever the payload task is would be far more efficient…
Not at all. What if the main drone has a fancy camera, sensors, radios, etc. on board? With your proposal now you’d need two of everything.
Given the need of this concept to stay in relatively close proximity to the swapable batteries, so they don’t spend most of their power just reaching the mother drone, it sure seems like either A- a straight tethering system, or B- a secondary drone that would fly up a tether to recharge in-flight, would be far more practical than this idea.
I’ll give them credit for apparently developing this to a technically working concept, but it seems blatantly obvious that it’s just totally impractical for any conceivable real-world use. I can’t imagine any use that would not be better served by tethering or simply landing for a quick battery swap. If you absolutely need to be in the air uninterrupted for long periods of time, other power sources (combustible fuels) are far better suited to the task.
With the methods being tried It certainly looks like success can be had.
Practical? That’s a secondary consideration.
How many different materials did Edison try before finding the solution to a the light bulb filament? Perseverance is worth it.
This is another way of saying “docking small drones to make a large drone”, which is super interesting.
Especially given that all the FAA regs specifically refer to “takeoff weight”, and not whatever may happen after takeoff.
Try solar panel on top of the drone I have done it and it gave me an hour of flight time
BS !
There is also an interesting video explanation for this concept by the researchers: https://youtu.be/P6XvhTe1Rdo
Lots of “thats quite impractical” comments. This is hackaday people! Practicality is a minor factor compared to “I wonder if I could ….”
This is an incredible idea!
Imagine a tethered, airborne mothership drone, featuring a bay of battery docking stations. Batteries are charged by power fed through the tether. When a customer drone needs charging, a charged battery would be launched from the tethered mothership.
By launching from an airborne mothership, the batteries do not need to perform an energy-intensive takeoff flight phase, thereby reaching the customer drone with a higher amount of energy that a ground-launched battery. The batteries could be of tilt-rotor design, in order to have a period of fixed-wing flight such that it uses as little power as possible on the way to the customer drone.
Upon rendezvous, the battery docks with the customer drone and charges it. Once the battery discharges down to a “fly-back” reserve level, the battery could fly back to the mothership for recharging. If the customer drone still demands charging, another battery can be deployed from the mothership to continue the charging. Alternatively, if there are no more batteries available on the mothership, the battery could be instructed to give it’s fly-back reserve to the customer drone. The battery could discharge further to a lower “safe landing” reserve, which is only enough to perform a short flight down to a safe landing on the ground.
If a battery performs a ground landing, it would attempt to land as close as possible to the nearest operating station, which is likely at the anchor station of the mothership tether. If it reaches the anchor station, an operator would place it in a charging bay, and once it has enough charge to ascend to the mothership, it would automatically fly up and dock with the mothership, ready to re-enter service.
If the battery drone does not make it back to the mothership or the tether anchor base, it would notify the central overwatch. that it is grounded. The overwatch can then instruct the nearest mothership or station to launch a battery, which would fly to the grounded battery, and transfer enough charge to it to allow the grounded battery to fly to the nearest anchor station, where it is treated as mentioned previously.
Yes. Battery drone for the battery drone.
I don’t have the money, but if anyone wants to patent this concept of operations, I’ll gladly sign over the rights in exchange for something :)
They have used a smaller battery than the drone battery Surely if they used a larger one, they could power the drone whilst charging its battery leading to infinite flight time?
I am looking for a battery for my drone. I think it has been discontinued, so I am trying to find another source for a battery purchase and would also like to find a more powerful (lasts longer in flight) battery. The brand name, I think, is the Propel Skymaster. The battery I have has numbers on it: 903065, 7.4V, 1500 mAh (I think…the numbers are partially covered by the ‘frame’ of the battery, and some of it is not able to be accessed) It is a ‘slide-in’ battery, it does NOT have connecting wires. It just makes connection with the drone via metal contacts. Thanks in advance for any help and I can email a picture of my battery if needed. -Russell Smith
How about a solar built in secondary quick charging system, that could assist the battery during daytime , and only use primary power, when secondary isn’t available 👍
wow!! great subject and somebody has been reading my mind or eaves dropping on my ideas. So i have been discussing this for about a year now and have i think a pretty good idea as to how this is going to have to be. Its not that we are going to change batteries in mid flight but have mid flight antenna hubs with landing pads and bluetooth charging so that means we will have to redesign batteries for bluetooth charging. And the charging hubs will imitate those high powered antennas that ham operators use and we can also have a self dock ing feature so the drone can self dock properly and when the charge is complete it signals for takeoff. Similar to a Tesla charge station but in the air. And they can be strategically station across the nation to test if its possible to fly a drone across country. And that will truly be earth shattering.