LIDAR has gained much popularity as a means for self-driving cars to survey the space around them. At their most basic, LIDAR is a surveying method that uses lasers to paints the space around the sensors and assembles the distances measured from reflected light into a digital three-dimensional representation. That’s something that has quite a number of other applications, from surveying ancient ruins and rainforests from a bird’s eye view to developing 3D models of indoor spaces.
 One fascinating use of LIDAR technology is to map out the routes inside caves, subterranean spaces that are seldom accessed by humans apart from those with specialized equipment and knowledge of how to safely traverse the underground terrain. [caver.adam] has been working on his Open LIDAR project for a few years using an SF30-B High Speed Rangefinder and laser device for a dual-system atop a gimbal with stepper motors for cave scanning.
One fascinating use of LIDAR technology is to map out the routes inside caves, subterranean spaces that are seldom accessed by humans apart from those with specialized equipment and knowledge of how to safely traverse the underground terrain. [caver.adam] has been working on his Open LIDAR project for a few years using an SF30-B High Speed Rangefinder and laser device for a dual-system atop a gimbal with stepper motors for cave scanning.
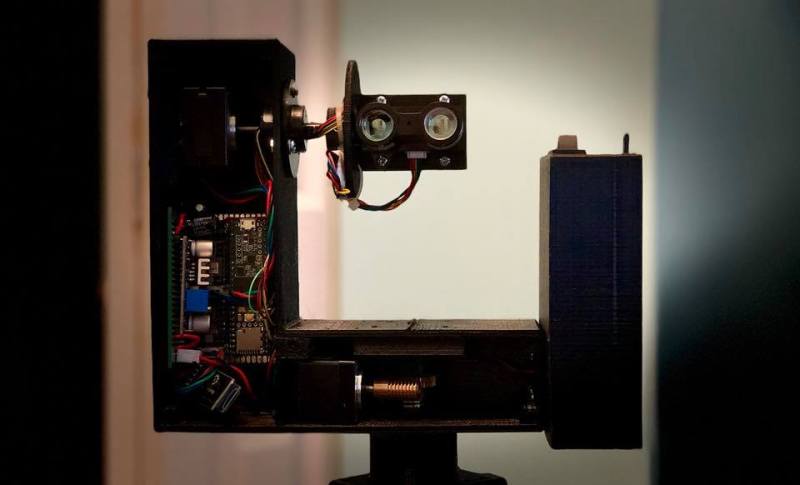
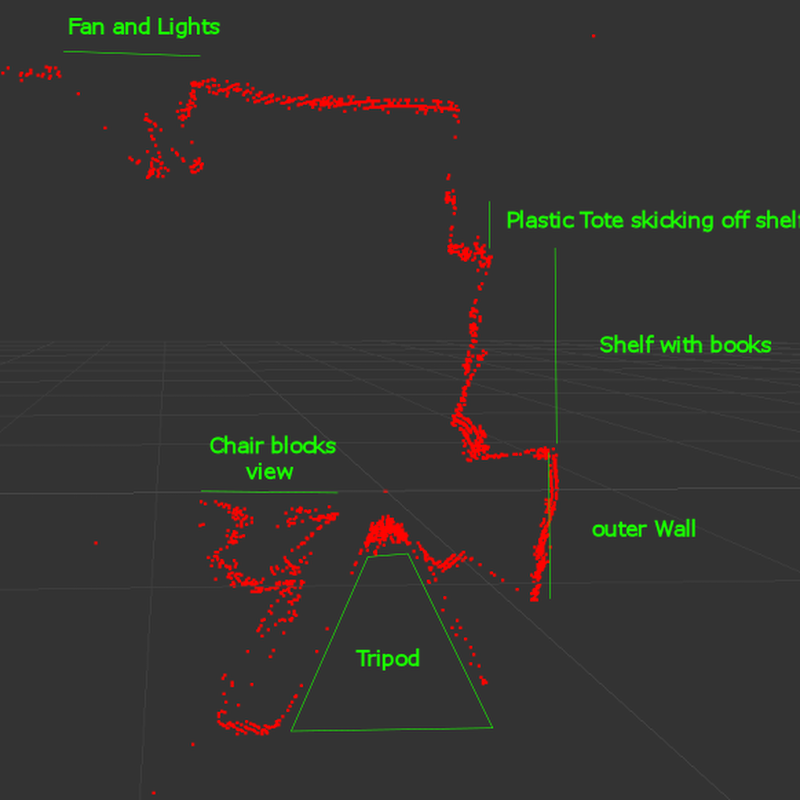
Originally an entry in the 2016 Hackaday Prize, [Adam] has continued to work on the project. The result shown in the video below is a cheaper 3D LIDAR setup that works by rotating the laser distance module on 2 axes with a sensor centered at the center of rotation. It works for volumetric calculations, detects change over time, and identifies various water patterns and rocks on a surface map. Compared to notebooks, tape measures, and compasses, it’s certainly a step up in cave surveying technology.
Check out some other past underground surveying projects, such as Iowa City’s beer caves scanning projects and National Geographic’s 2014 expedition of the Titan Chamber in southern Guizhou Province in China.














They did this in that horrible, horrible Prometheus movie.
https://www.youtube.com/watch?v=3jeUTcNucYY
While we’re on the subject of LIDAR in popular culture, there’s a game from a few years back called “Scanner Sombre”, where you start in a pitch black cave and have to find your way out with only a hand held scanner. Watch it in action here.
Flashback from 2.5 years :) Described project with same LIDAR, but results were bit more spectatular: https://www.kurokesu.com/main/2017/05/08/3d-scanning-like-a-pro
That’s quite impressive. It’s amazing how much this has progressed in such a short time. Overlay HD video. The film and game industries are putting in a few pennies. I dread to think what the military has, although granted I’d like to play with it.
https://m.youtube.com/watch?v=k8q5xr_eLgk
Prometheus was a wonderful movie… If you ignored the awful acting, the poorly written screenplay, the horrible special defects, the willful ignorance of physics, the “we know what we are doing” behavior that no person who knew what they were doing would ever exhibit…
Oh, wait. Prometheus was a wonderful movie if you enjoy examples of what NOT to do with a movie.
No ordinary defects for this movie. Special all the way.
Did they bill it as an eclectic mix of talent? Director from horror movies, screenwriter from porn, sfx guy from period dramas, producer from christian kids programs…
“That’s something that has quite a number of other applications, from surveying ancient ruins and rainforests from a bird’s eye view to developing 3D models of indoor spaces.”
Real Estate. Gamers who want to turn their basement into a level, etc.
I would recommend photogrammetry or a structured light+color sensor/camera for those applications, you do not need LIDAR quality point clouds and you probably want to retrieve the texture for your 3d model at the same time.
If someone creates a LIDAR that reads the data for the surface color (to create a texture), that would be optimal of course. The best you can hope for currently is reflectivity level.
Combine technologies for best result is the current solution.
The PC game Scanner Sombre is a neat implemention of this concept. Made it really easy to visualize this kinda concept in 3D space.
Very informative and great development project, I am following where this is going.
My current favourite LIDAR is the one from Livox that I found out about here at Hackaday about a year ago, it works great. Only downside I have found is that it sounds like a harddrive about to crash when it is scanning.
Thanks Hackaday for the tip!