Unlike most cutting lasers, femtosecond lasers don’t vaporize materials; rather, they produce such short, intense bursts of light that the affected region is ablated without having the chance to heat its surroundings. This makes them good at cutting away material without damaging the surroundings, something [Ben Krasnow] exploited to cut cross-sections of samples while still in a scanning-electron microscope.
In this case, the samples were crickets, and before imaging they had to be prepared. First, the bodies were soaked in glutaraldehyde to cross-link the proteins and stabilize the structure. Next, a series of solvent exchanges replaced the water in the bodies with a low-surface-tension solvent; this meant that during the next step, drying, surface tension wouldn’t distort the crickets’ internal structure. Finally, the insect bodies were charred under argon, which made the bodies conductive and more absorptive to laser light.
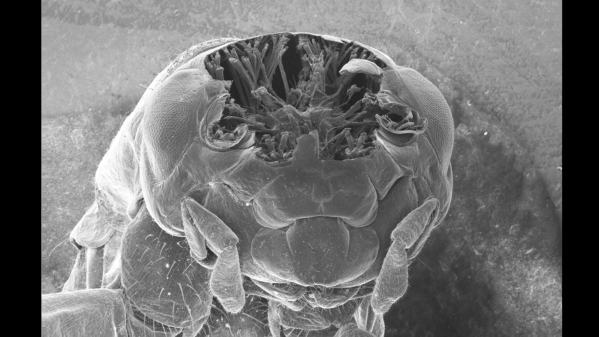
The laser itself and the scanning galvo are mounted outside the microscope, and shine in through a transparent window. To protect the detector and electron optics from a spray of ablated carbon, a servo motor swings an aluminium shutter between these and the sample while the laser is active. This caused some mysterious problems during testing: after the first ablation run, the electron microscope’s image would contain so much noise as to be unusable, but it would improve over time. As it turned out, the shutter was painted, and the other side of the paint was getting coated with charged carbon particles. This created a small capacitor which disrupted the electron optics as it discharged. Eventually, after solving this and a few other strange problems, [Ben] was able to take several time-lapse videos of the laser gradually ablating a cricket, 30 microns at a time, revealing its inner structure.
Although scanning-electron microscopes are unfortunately shard to come by, it’s still possible to restore a secondhand microscope or, as [Ben] did, build your own. Femtosecond lasers are yet more inaccessible, though they can be used to replicate themselves.
Continue reading “Cross-Sectioning Crickets With A Femtosecond Laser”