
The first thing Jeremy Cook thought when he saw a video of Theo Jansen’s Strandbeest walking across the beach was how incredible the machine looked. His second thought was that there was no way he’d ever be able to build something like that himself. It’s a feeling that most of us have had at one time or another, especially when starting down a path we’ve never been on before.
But those doubts didn’t keep him from researching how the Strandbeest worked, or stop him from taking the first tentative steps towards building his own version. It certainly didn’t happen overnight. It didn’t happen over a month or even a year, either.
For those keeping score, his talk at the 2019 Hackaday Superconference, “Strandbeests: From Impossible Build to Dominating My Garage” is the culmination of over six years of experimentation and iteration.
His first builds could barely move, and when they did, it wasn’t for long. But the latest version, which he demonstrated live in front of a packed audience at the LA College of Music, trotted across the stage with an almost otherworldly smoothness. To say that he’s gotten good at building these machines would be something of an understatement.
Jeremy’s talk is primarily focused on his Strandbeest creations, but it’s also a fascinating look at how a person can gradually move from inspiration to mastery through incremental improvements. He could have stopped after the first, second, or even third failure. But instead he persisted to the point he’s an expert at something he once believed was out of his reach.
Learning to Crawl
There’s a well known Chinese proverb that, roughly translated, states “a journey of a thousand miles begins with a single step.” It’s something to keep in mind any time you take on a challenge, but it rings especially true for anyone looking to build a Strandbeest. Rather than trying to tackle the entire machine at once, Jeremy thought a reasonable enough approach to constructing a multi-legged walking robot was to first build a single leg and understand how it operates.
With one leg built and working, the next step was of course to build more of them. When he had four assembled, it was time to design a base to mount them on, and then outfit it with electric motors to get things moving.
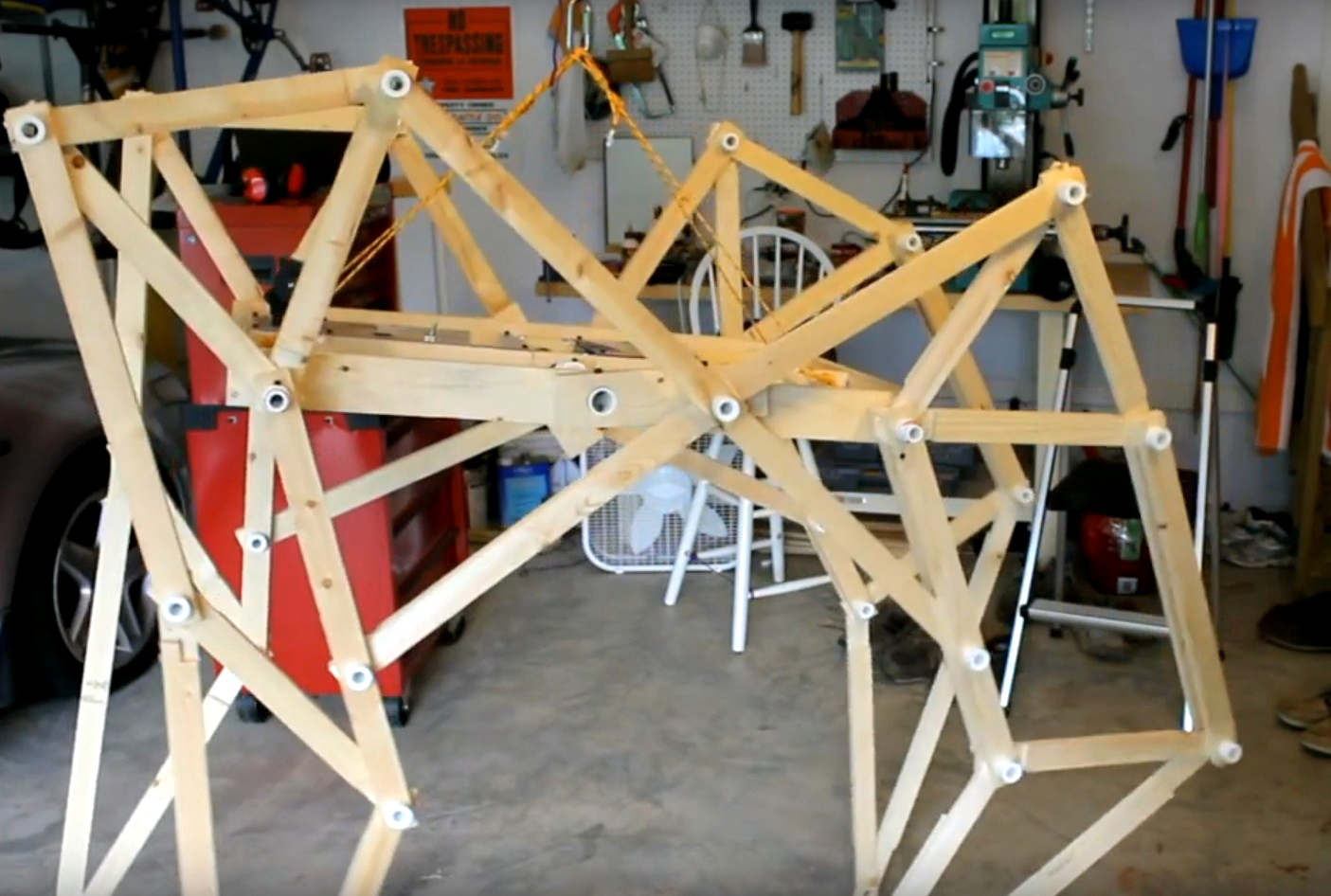
Unfortunately this first Strandbeest, made of wood and roughly the size of a golf cart, never worked very well. Jeremy attributes its failure to a number of issues which he would eventually learn to solve, such as imprecision in the linkages, excessive friction, and undersized motors. That first build may have failed as a walker, but it served as a fantastic learning experience.
For the second Strandbeest Jeremy switched over to cutting the parts out of MDF, but the contraption was still too heavy. This version was even less successful than the first, and it soon fell apart. It seemed clear at this point that the way forward was to scale the design down to a more manageable size.
The Next Generation
Once he shrunk the walker’s design down to tabletop scale, Jeremy really started seeing some progress. It still took a few iterations to get something that could move around without jamming up or rattling itself to pieces, but with parts that could be accurately cut on a CNC router and the addition of a new geared drive system, these smaller Strandbeests really started to come alive.
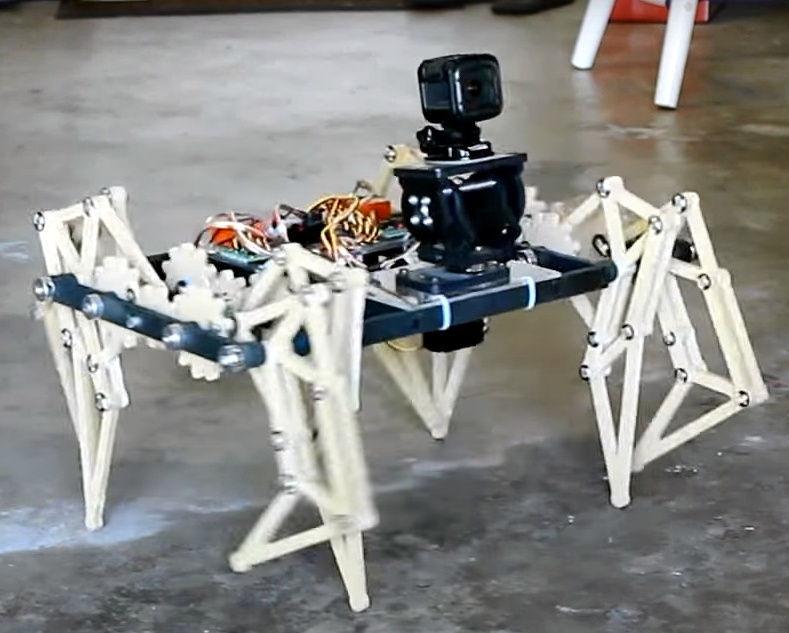
Not only did they perform much better, but the eventual switch to clear acrylic gave them a very distinctive look. Around this time, Jeremy also started to add some anthropomorphic features, like articulated “heads” that housed cameras or LED “eyes”. These features not only gave his bots the ability to emote, but also marked a clear separation between his creations and that of Theo Jansen, who’s designs were only getting larger and more alien as time went on.
The latest and greatest of these acrylic Strandbeests is the ClearCrawler, which takes into account all the lessons Jeremy has learned over the years. Powered by an Arduino Nano and controllable via a custom handheld remote using nRF24L01 modules, this walker is easily expandable and provides an excellent platform for further research and exploration.
Staying Humble
Despite the leaps and bounds that Jeremy has made with his Strandbeests, he still remains in awe of the original wind-powered walkers that Theo Jansen unveiled all those years ago. If anything, he says he has more respect for those creations now than when he first saw them. Looking at it with no knowledge of how it works, you’ll of course be impressed. But once you understand the mechanisms involved, and just how hard it is to build and operate these creations, you realize what a monumental accomplishment it really was.
Which is perhaps the real lesson to be learned after watching Jeremy’s talk: there’s always more to learn and be impressed by. Even if you’ve been working on a particular project for years and now are at the point where you’re giving presentations on it at a hardware hacking conference, don’t be surprised if you still find yourself scratching your head from time to time. Rather than being discouraged, use the experience as inspiration to keep pushing forward and learning more.













You were so close to “living his strandbeest-life.”
Theo Jansen is such a unique and interesting and brilliant person. What a nice thing to have in the world.
Awesome article. Thanks so much Tom!
Great little machine. I am particularly impressed that you stayed with the idea and worked through all the issues, and through iterations of the design, to the impressive performance of your ClearCrawler.
Six years! Jeez I can’t stay with a project for six days…
Respect.
Reconstruction Designs of Lost Ancient Chinese Machinery
Author: Yan, Hong-Sen
978-1-4020-6459-3
Page 277
8.4 Other Walking Machines
In the Song Dynasty ( AD 960–1279), the interpretations regarding the
wooden ox and gliding horse became diverse. However, it is noteworthy
that the poem Yang Ma Ge (秧馬歌) by Su Shi (蘇軾) ( AD 1037–1101)
described a horse planting rice seedlings in the field. The reasonable
conjecture should be that there is a horse-shaped mechanical device
helping the job of a farmer. Furthermore, the works of Yuan Mei (袁枚) in
the Qing Dynasty ( AD 1644–1911) mentioned that Jiang Yong (江永, AD
1681–1762) could invent magical walking devices. For example, Chapter
107 in the Bei Zhuan Collection《碑傳集》said that: “Someone rode a
wooden donkey that eats nothing and talks silence outside the city, and
people took it as a weird thing. However, this amazed device was
functioned mechanically based on Zhu-ge Liang’s approach, not a weird
thing.”『行城外騎一木驢,不食不鳴,人以為妖。笑曰:此武侯成
法,不過用機耳,非妖也。』