
A common sight in automobile-congested cities such as New York are parking meters lining the curbs next to parking spots. They’re an autonomous way for the city to charge for the space taken by cars parked along the sidewalk near high-traffic commercial areas, incentivizing people to wrap up their business and move their vehicle out of a costly or time-limited parking space.
The parking meter is such a mundane device most people wouldn’t look at them twice, but on the inside it’s fascinating to see how they’re engineered, how that’s changed through the years, and how a software bug handicapped thousands of digital meters at the start of 2020.
The Origin Of The Parking Meter
Parking meters were originally commissioned in the 1930s by the government of Oklahoma City, due to the rapidly increasing number of automobiles, and therefore demand for parking space. Up until then, the city used patrolling policemen to regulate parking space, but they couldn’t keep up with the pace of the increased traffic and the lack of available parking space made business drop around downtown shops.
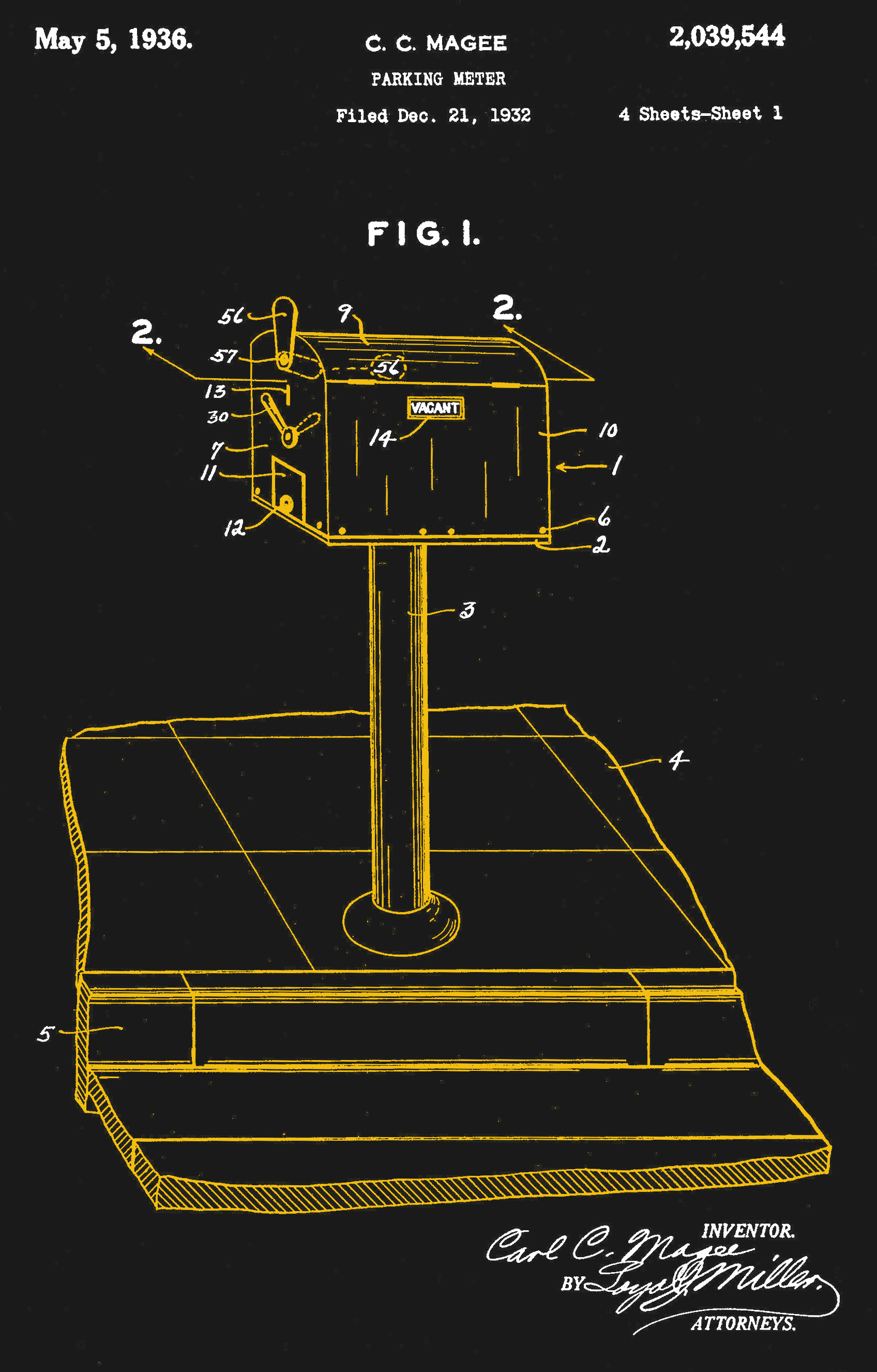
The first widely-adopted parking meter was dubbed “Black Maria”, a machine patented in 1935 by Carl C. Magee and Gerald Hale and first installed in the city in July of that year. This was a completely automated mechanical device made to solve the problem of regulating the time a driver can park their car in a given spot. It would take a nickel as payment, inserted into the mechanism by rotating a handle which also served to wind a clock spring. This clock would then tick down the remaining time the user could remain parked there, which could range from 15 minutes to an hour depending on the location.

Within days store owners noticed a positive effect in their profits thanks to the increase in customers with the regulated parking. What’s more, the coins collected from the meters also generated revenue for the city, and so, parking meters started spreading throughout the city. And as decades went, the mechanics were improved upon. A window was added into which a patrolling officer could easily look to check if the right amount of money (or money at all) was inserted. Separate panels for the coins to be easily collected without risking damage to the rest of the internal clockwork were also added.
The evolution of parking meters eventually passed through meters that could take care of parking spaces on either side of it, halving the amount of necessary poles per sidewalk. Electronic models starting appearing in the 1990s and eventually connectivity added. With meters all hooked up to the same network, the symbiotic connection between the parking meter and your spot was severed. It didn’t matter where your car was parked anymore; you could simply take your printed ticket and put it on your dashboard to be legally parked. Further advancements led to numbers spots that can be paid from any kiosk in the city, or though a smartphone app. But those digital advancements don’t always translate into reliability…
Continue reading “Parking Meters That Were A Bit Too Smart For Their Own Good”



 We covered the
We covered the 








