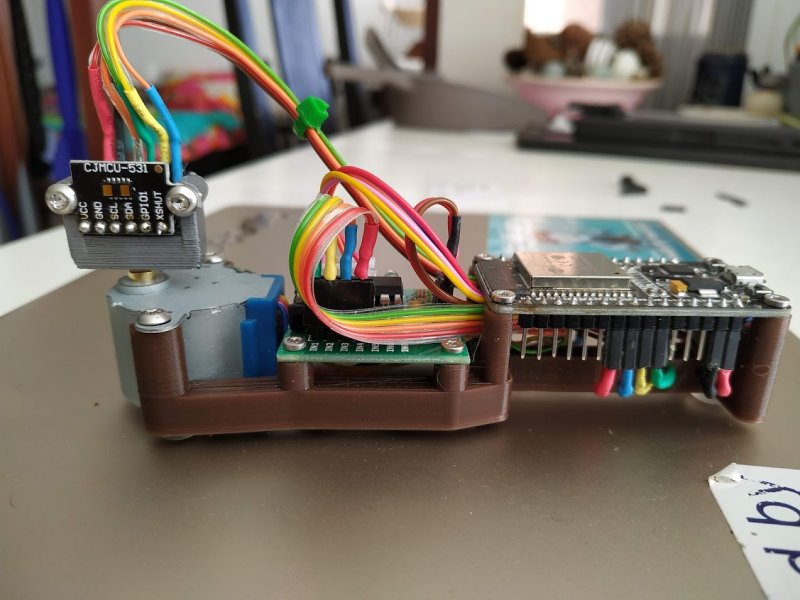
Moore’s law may have reached its physical limit for transistor density, but plenty of other technologies are still on that familiar path of getting smaller and smaller as time passes. It looks like LIDAR is no exception to this trend either. This project from [Owen] shows a fully-functional LIDAR system for about $20 and built almost entirely on top of an ESP32.
The build uses a Time-Of-Flight IR laser range sensor controlled by the ESP32, and the sensor is much smaller than even the ESP32’s footprint so it takes up very little extra space. To get it to function as a LIDAR system instead of just a simple rangefinder it does need a motor in order to rotate itself to see its entire space. Besides its small form factor and low cost, it also has a handy user interface that can run anywhere an HTML5 browser can run, making the use of the system easy and straightforward as well. All of the code is available on the project’s GitHub page.
We wouldn’t expect a system like this to be driving an autonomous car anytime soon, it’s update rate is far too slow, but its intent for small robots and even as an educational demo for learning LIDAR is second to none. If you do need a little more power in a LIDAR system but still don’t want to break the bank, we featured this impressive setup a few weeks ago.














Is the CJMCU-531 a true Time Of Flight sensor (should be able to see multiple reflections)? Or is this one of those Phase sensors (only can see the most prominent reflection)? I ask as some of my interests bend toward partly transparent / translucent targets.
How did you get access to my journals, what do you know of my secret army of supersonic jellyfish?
It’s a VL53L1X based chip (so actual Lidar ToF) that is good for a published 400cm but it’s actually somewhat usable beyond that. Having played with these, they are actually pretty robust because they actually read reflections in real time and they work by literally measuring the time of flight for light to travel. It’s pretty impressive. Feel free to read up a whole lot more on these as there is a robust amount of both technical data, examples and specific chip nuances as well.
https://www.st.com/resource/en/product_presentation/SensorsLive_LiDAR_Chip.pdf
Great project looks well implemented, I actually found a commercial Lidar on Aliexpress for $50-70 it looks very much like it’s a technology that is finally coming of age!
All cheap Chinese LIDARs are based on triangulation distance measurement method.
VL53L1X chip which is used in this project is based on ToF method. The disadvantages of this chip are low measurement speed and big width of the lasers beam.
Second generation Kinect uses ToF LIDAR as well.
Here’s another way to do this, using 3 VL53L0X as well. Covered here back in 2018.
https://hackaday.com/2018/06/29/xlidar-is-a-merry-go-round-of-time-of-flight-sensors/