The news was recently abuzz with stories of how the Mars 2020 mission, which launched from Cape Canaveral at the end of July, had done something that no other spacecraft had done before: it had successfully charged the batteries aboard a tiny helicopter that is hitching a ride in the belly of the Mars 2020 rover, Perseverance.
Although the helicopter, aptly named Ingenuity, is only a technology demonstrator, and flight operations will occupy but a small fraction of the time Mars 2020 is devoting to its science missions, it has still understandably captured the popular imagination. This will be humanity’s first attempt at controlled, powered flight on another planet, after all, and that alone is enough to spur intense interest in what amounts to a side-project for NASA. So here’s a closer look at Ingenuity, and what it takes to build a helicopter that will explore another world.
Designed for Mars
Despite coverage in the popular press about how NASA is sending a drone to Mars, there’s practically no resemblance between Ingenuity and any conventional terrestrial multicopter. It turns out that when you design a helicopter to operate in a place where the air is as thin as it is at 115,000 feet (35 km) on Earth and with a third its gravitational pull, you end up with a unique and unusual machine.
The most striking difference between Ingenuity and a more traditional multicopter is the choice to make it a dual-rotor design. There would have been no way to go with a quadcopter design, mostly due to the size of the rotors but also because it would have vastly complicated stowage of the helicopter.
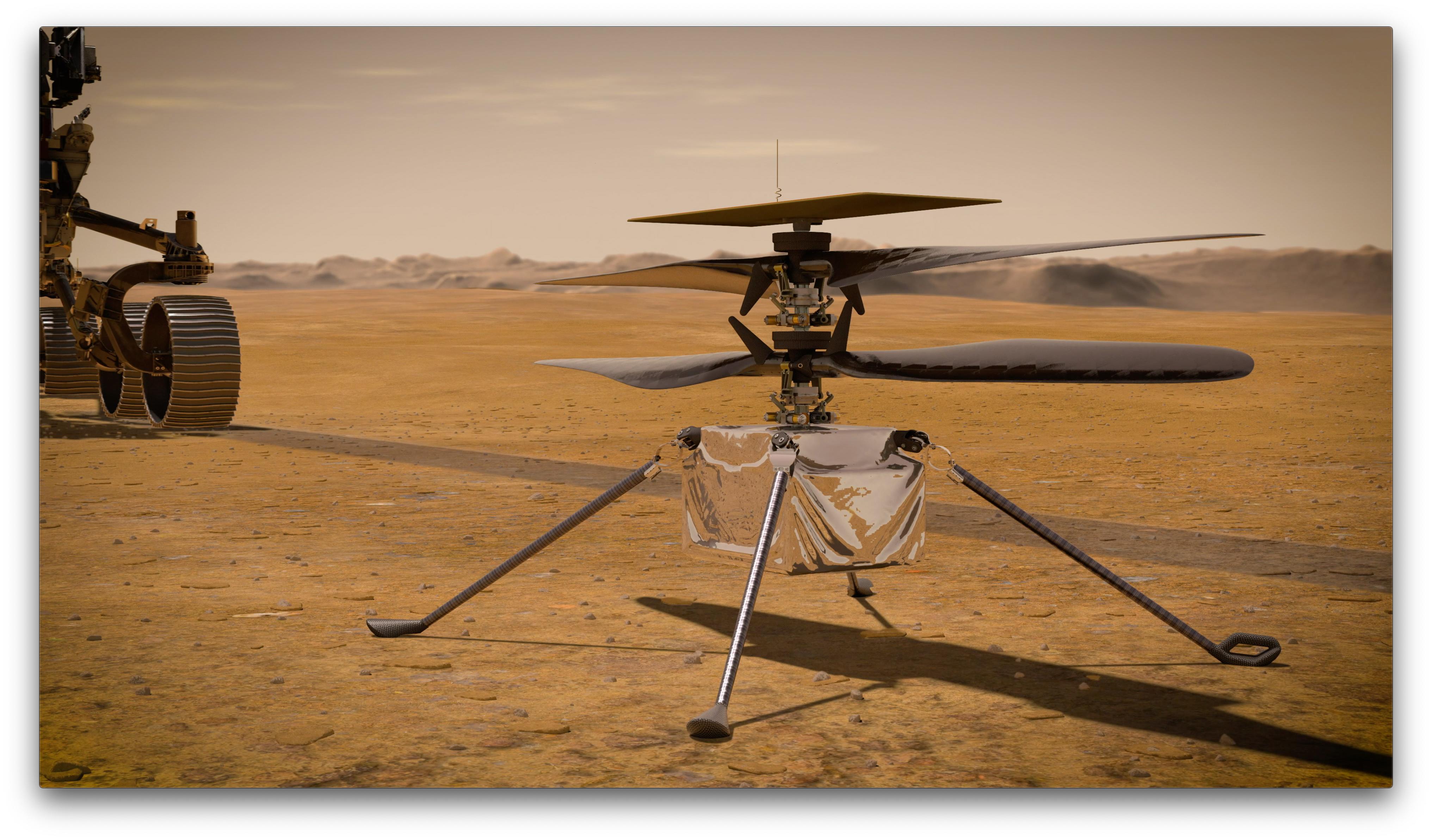
According to a paywalled paper by the engineers who designed Ingenuity, NASA was also worried about the phenomenon of blade flapping, which is caused by flexing of the rotor blades above and below the plane of rotation. Without Earth’s thick atmosphere to damp blade flapping, a traditional rotor design would likely tear itself to pieces on Mars. So the blades for Ingenuity were designed to be extremely stiff while at the same time being thin, lightweight, and very broad across the blade root, to provide the extra lift needed in the thin Martian atmosphere. The blades are built from a composite of carbon fiber skins over a molded foam core, and each of the two coaxial rotors is just over 1.2 meters in diameter.
Another way in which Ingenuity differs from terrestrial multicopters is in the flight control systems. Where most quads only have fixed-pitch rotor blades and use differential motor speed to achieve pitch, yaw, and roll control, Ingenuity uses a pair of swashplates to control each rotor’s collective and cyclic pitch. Each titanium swashplate is controlled by a trio of tiny servos anchored to the rotor mast, and is connected to the rotor using connecting rods machined from polyetheretherketone (PEEK) plastic.
Unsurprisingly, the motors for Ingenuity are pretty special too. Like most terrestrial multicopters, Ingenuity’s two motors are of the brushless DC design, but the similarities stop there. The 46-pole stator was hand-wound using copper wire with a rectangular cross-section, to allow for better packing than would be possible with round copper wire. The high coil count and the exotic lightweight materials used for the housing make the motors very efficient, very light, and very compact. They’re also hard to spot in the photograph below; one is barely peeking out from between the top rotor and the solar panel, while the other is nestled between the bottom rotor and the swashplate for the upper rotor.

Deployment
As configured for flight, Ingenuity is just as gangly and unwieldy as every other helicopter. Finding a way to stow any helicopter in a compact, shippable package is a complex task, and only more so when it needs to survive a rocket launch, a six-month interplanetary journey, and a high-energy autonomous landing on Mars.
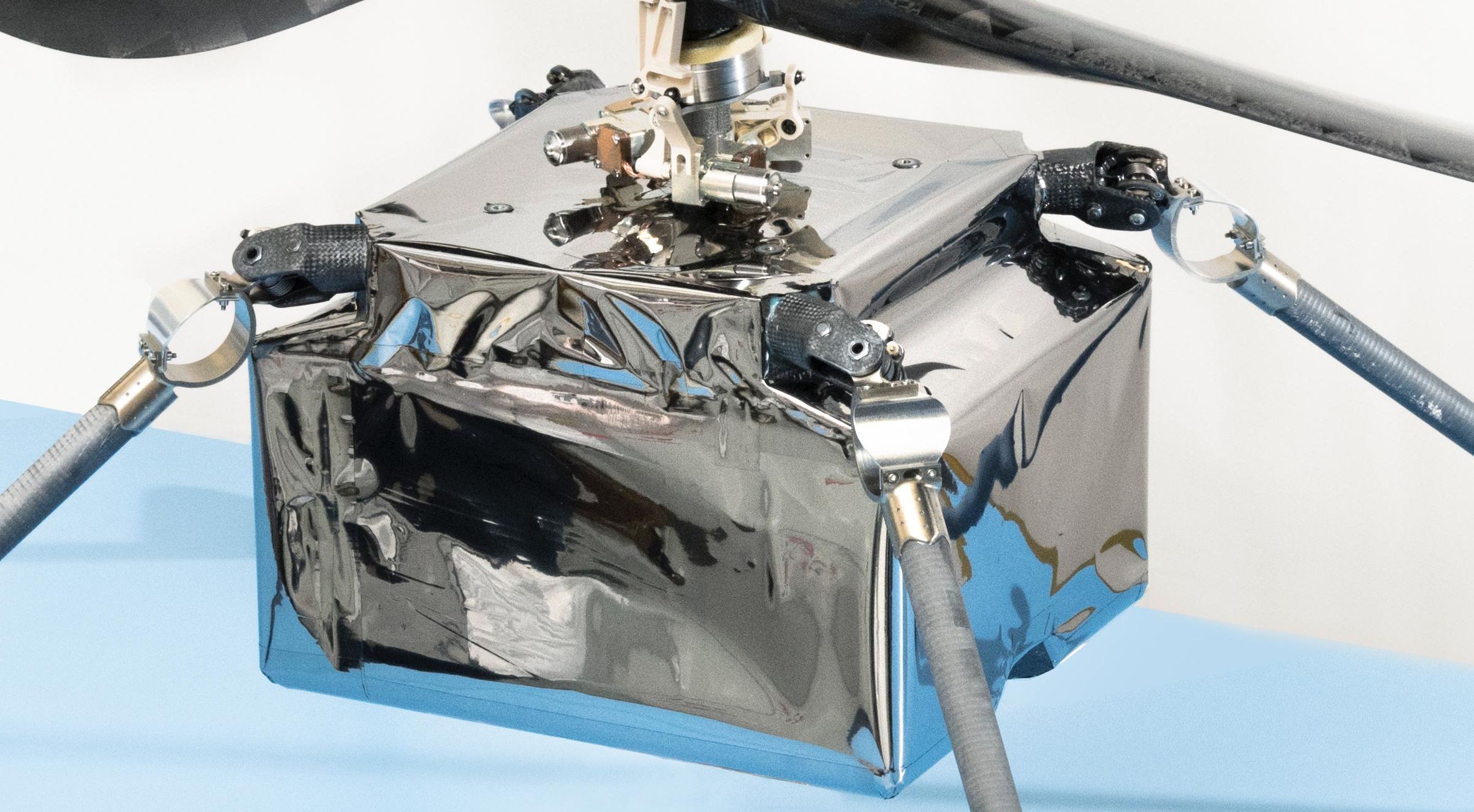
Ingenuity’s design makes at least the job of stowing the craft straightforward, thanks to its thin profile when the rotor blades are aligned with each other. The landing legs are another thing, though. The hinges for the four legs need to allow the legs to bend up toward the rotors to make the package as small as possible, while still providing shock absorption for landings. To accomplish both goals, each leg is attached to the body by a deployment hinge, which snaps the leg down to their deployed position under spring pressure. Just after the deployment hinge is a titanium and aluminum flexure, a compliant mechanism that absorbs the shock of up to 2 meters per second landings.
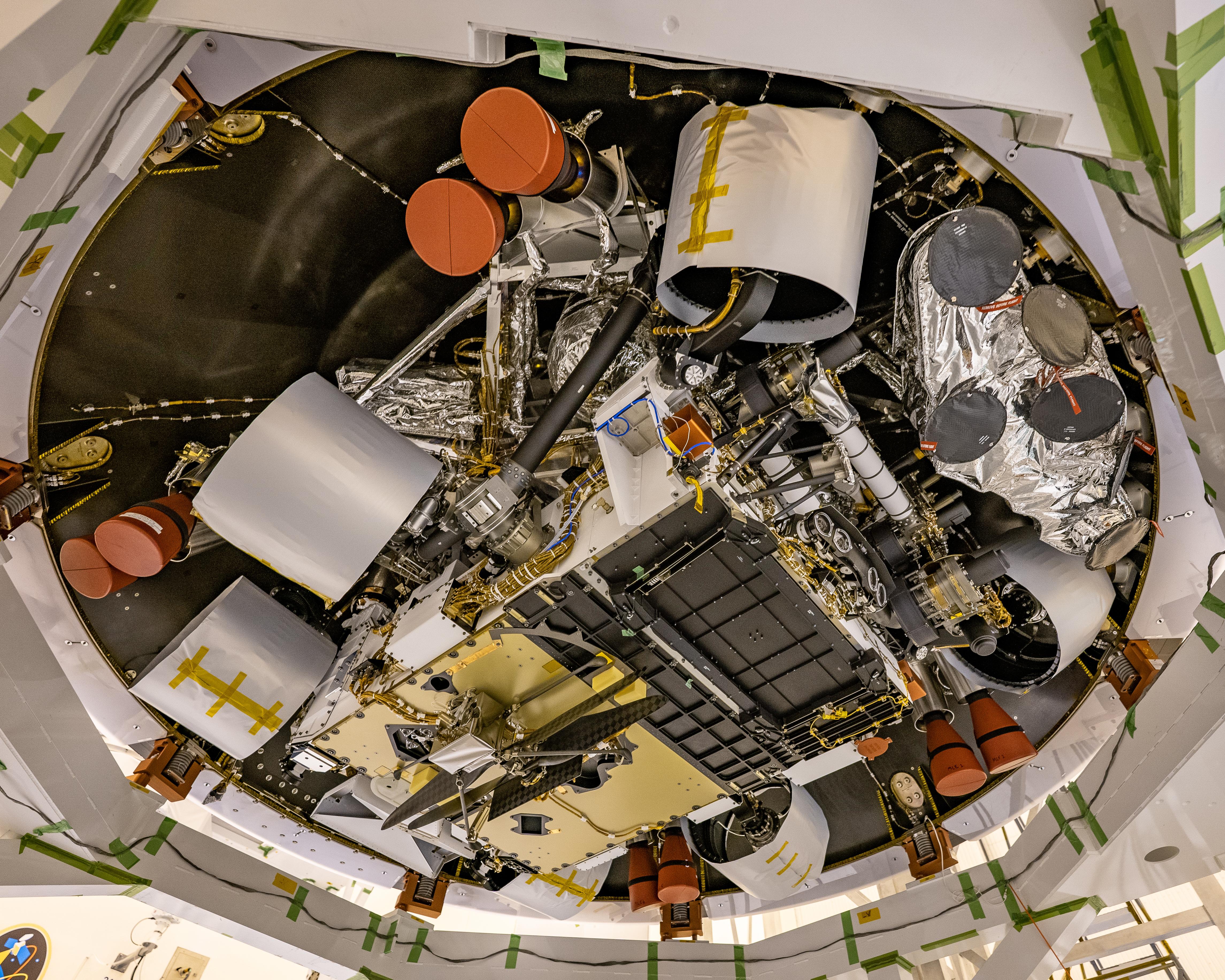
Deploying Ingenuity to the Martian surface will be a complex, highly orchestrated process. The helicopter is stowed in the underbelly of Perseverance, behind the bay holding the Adaptive Caching Assembly. Despite the presence of a robot arm in the ACA bay, Ingenuity will not be plucked from storage and placed gingerly on the surface. Rather, as the video below (source: NASA/JPL) demonstrates, after a debris shield is jettisoned and the rover moves away to a clear zone, the helicopter will swing down from its horizontal storage position to a vertical orientation. The legs will be released to spring into position, and the helicopter will be dropped a few inches to the Martian surface. It’s an operation that will no doubt take days to complete, as each stage of deployment will be preceded and followed by multiple systems checks and surveys of the area with the many cameras sprouting from the rover and the helicopter itself.
Surface Operations
Once free from the plutonium-warmed belly of Perseverance, Ingenuity will have to deal with the extreme cold of Martian nights all by itself. The electronics needed to run the helicopter, including the already-charged batteries, the flight controller, and the cameras and other sensors needed for the look-down navigation system and altimeters, are all housed within a thermal management enclosure called the Helicopter Warm Electronics Box, or HWEB. This box dangles between the helicopter landing legs and uses a combination of thin-film heaters and a layer of polyamide insulation to both absorb as much solar thermal energy as possible while reducing heat loss from the inside of the HWEB to the Martian atmosphere.
Having an autonomous helicopter at your disposal might seem like a dream come true for mission planners, allowing them to quickly get eyes on some interesting feature to see if it’s worth slowing driving the rover over for a closer examination. And indeed, that’s something that NASA very much has in mind for future missions. But Ingenuity has far more modest goals, mainly as a proof-of-concept of non-terrestrial flight.
After proving that it can survive the ride to Mars, descent and landing, and being successfully deployed to the surface, Ingenuity is scheduled for only a few short flights. None of the fully autonomous test flights will last no more than 90 seconds, and the helicopter will stay within 50 meters of Perseverance and never get more than 5 meters above the surface.
Assuming Ingenuity is able to get off the surface and land safely again, a total of up to four additional flights will take place. But once the test period is over, Perseverance will move on, hopefully leaving the spidery helicopter upright on the Martian surface, having fulfilled its mission of proving that aircraft can operate on other worlds.














I lol’d at the lead image. Good artist!
paywalls are shit
https://dacemirror.sci-hub.tw/proceedings-article/b9436cb5eae1d84448021b7c65731883/pipenberg2019.pdf
👍❤️
Yep, and putting taxpayer funded materials behind them are doubly as bad. Same with selling taxpayer funded television programming to private companies that that then put it behind paywalls. Looking at you LeVar Burton.
I am worried about Val Kilmer!!, the movie Red Planet (year 2000) had the robot AIMEE with this helicopter feature
Incredible how fiction sometimes is similar to real life
“None of the fully autonomous test flights will last no more than 90 seconds,” double negative?
“Okay, who forgot to charge the batteries?”
“This will be humanity’s first attempt at controlled, powered flight on another planet”
Uh, Neil Armstrong *chose* his landing site when he was piloting the LEM.
Since we’re being pedantic, the Moon is not a planet.
Gee, that never occurred to me! Thanks for the edumacation!
The definition of “planet” is constantly changing.
https://en.wikipedia.org/wiki/Planet#Objects_formerly_considered_planets
If it’s close enough, it’s good enough.
Woah! What a cornucopia of planetary information. Thanks for the link!
Pretty sure the current Pope is not a planet.
“Since we’re being pedantic, the Moon is not a planet.”
Unlike Pluto.
(Ducks and makes popcorn simultaneously.)
You see, everyone agrees with that statement.
plenty of non-paywalled versions of papers at
https://trs.jpl.nasa.gov/discover?scope=%2F&query=balaram+helicopter&submit=Go
Thanks.
It makes me wonder if they are planning for future versions to have a pebble of plutonium on-board to recharge it.
I went to the JPL open weekend last year and talked with one of the engineers – I’m sure I remember him saying that the onboard solar (above the rotors) would recharge it enough for tens of seconds of flight per day… doubt that changed between last year and launch, but maybe they’re not counting on it.
Any dust storm would probably tip it over, too.
Videos I saw during the development phase definitely indicated solar recharging, with a round PV panel above the top rotor. I suspect they found that the benefit of having more flights did not exceed the cost in weight. NASA considers Ingenuity to be a high-risk, high-benefit add-on, and in this light, they may have seen additional flights as still adding to the risk, without a lot of added benefit. By limiting the flights according to the battery capacity, they can control the expectations.
Where would the air to power the dust storm come from?
Mars has atmosphere. Thin, about 1% of Earth’s atmospheric density, but enough for winds.
Yeah, duh. So 100th of the air and 100% of the dust. Tell me again where the dust storms come from? And why imaginary dust storms are more worrisome than THE IMAGINARY SUPERPOWERFUL 1% WINDS?
I realize they’re not completely imaginary, but if F=MA speed does not equal force. Do the math.
This is literally not rocket science.
Pretty small rotors for an atmosphere that thin, if indeed it is that thin.
1) Yes, the rotors are small. And the helicopter is extremely light. Ingenuity was an add-on project, not one of the main objectives of the mission. The interest that people take in this (for example, in this article) is the main reason it’s on the spacecraft – it’s a high risk (autonomous machines in general are challenging), high benefit (lots of renewed interest among the public when it succeeds), low cost project. So it was included in the mission, but had small mass and volume budgets.
2) Did you know? We’ve had several landers on the surface of Mars. They have measured the atmospheric density, directly. So yes, it IS that thin.
3) Gravity on Mars is only about 38% what it is on Earth. That we also know well – if it was off, we wouldn’t have successfully landed other craft there.
The reason we are able to send things like small helicopters to other planets, is that engineers don’t stop at “seems like that wouldn’t work”, but go on and do the math, and do experiments to test their assumptions.
OMG Do you realize that there is ~0.01Bar pressure? Highest windspeed during sever storms on Mars max around 100 km/h but now consider that they are moving around hundredth of mass they would on Earth. It won’t do a shit to a few kg helicopter with small cross sections area and normal wind wouldn’t even move a sheet of paper. That stupid Martian book and movie is teaching people shit.
18 square kilometers of dust has some inertia in it https://www.nasa.gov/feature/jpl/opportunity-hunkers-down-during-dust-storm I do not know how dense the dust cloud is but the dust particle is pretty dense and enough particles hitting the machine will apply some serious pressure.
Photons do not have considerable mass and they travel in vacuum, yet we have solar sails …
The titan helicopter, Dragonfly, is slated to be atomic. Slow charge from the atomics into the batteries, and then short flights on the batteries.
That “pebble of plutonium” only generates heat. To make that a full RTG you need some more components, which are probably too heavy.
Counter-rotating overhead blades allow elimination of a tail rotor with no loss to control authority AND saves a lot of energy to use as lift instead. They need the lift in the thin atmosphere.
i wonder if the created the air pressure of mars in a controlled environment here on earth to test the lift capability and if they did-how high did they try to get it to fly?
I’d certainly hope so. Plus I hope they accounted for the variation in atmospheric density, which can be huge on Mars vs Earth. Then again perhaps it’s only intended to operate for a certain period of it’s landing season and at a the given latitude.
Veritasium did a 20min vid on the flyer. He answered some of those questions and gave a great insite into what they had done
https://www.youtube.com/watch?v=GhsZUZmJvaM
Great video, thanks for posting that.
the vacuum chamber is like 20 feet tall so they had room
dual rotors are a great design. I used to have a very nice r/c helicopter. dual rotor. I sucked at flying it, but it sure did pack up nice and small and was battery efficient.
If I understood it correctly the rotors alone form the base of the flying machine. Electronics and power storage are just payload which acts also as a stabilisator. As the motors are integrated in rotors the counter rotation mechanics is the only way to go here. Nice design and at least I can’t come up with anything they could have done differently to same mass, except maybe integrate the solar cells into the rotor blades.
So there’s going to be nothing around for the 20 million dollar helicopter to hit except the billion dollar, nuclear powered rover?
It seems a hideously expensive and risky experiment with almost no gain (in my view) over simulation and testing the props in a large vacuum chamber. However, it is cool and I rather like the idea of a hideously expensive and risky experiment :O)
Total aside – rather like the idea of having above atmospheric pressure in space stations/habitats. Would allow much more oomph from fans and propellers. Yeah, there’s probably a whole for/against argument that it massively looses, but meh.
The development and testing was done in a large vacuum chamber! There are numerous videos of it.
You’d really thing they wouldn’t test in a chamber when it is like an easiest thing in the world comparing to the actual designing, modeling, and simulation.
Of course I’d expect them to test in a chamber. It’s the madness of doing it on mars that I like :)
Hopefully this works out like Curiosity, fulfilling its mission and remaining operational for quite a while afterward for further exploration.
Bonus points if they can fly over to Opportunity and blow the dust off those solar panels. :-)
Man, that Opportunity rover should be renamed to Perseverance rather than this new one!
Well, having a nuke power supply it doesn’t have solar panels to get dirty.
Doh! I was thinking about Curiosity.
Thats an awesome idea! Given the conditions, do you think the rotor wash would be enough to move any dust?
Those swash plates seam overly complex for no reason… wouldn’t a quad copter style system be reliable? direct prop to motor connection, still flyable on 3 if one motor dies, can handle much more abuse that system… what am i missing ?
Seems like you’re missing the rest of the article, since it explains why a quad layout wasn’t used.
Incidentally, a quad can’t fly with only 3 motors running. Crash gracefully maybe, if the software was smart enough. But not fly.
12 days ago.
Keeping drones aloft after engine failure
Robotics researchers show how quadrotors can be saved from falling if one rotor fails.
https://www.aerospacemanufacturinganddesign.com/article/keeping-drones-aloft-after-engine-failure/
So, Ingenuity has never flown in totally free flight before. And it’s first free flight will be on Mars.
That is correct. That’s what makes it a high-risk project. NASA had a similar situation when training astronauts to fly the Lunar Excursion Module (LEM), the spacecraft that landed on the moon six times in 1969 through 1972. They nailed it then.